

Modular conveyor system having multiple moving elements under independent control
a conveyor system and moving element technology, applied in the field of conveyor systems, can solve the problems of affecting the scaling of the system, the speed of the belt is typically quite limited, and the pallets are likely to be jarred by strong impact between the mechanical stop and the pallet, so as to achieve the effect of enhancing the scaling properties of the system, reducing the burden on the central controller, and facilitating the movement of the track
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
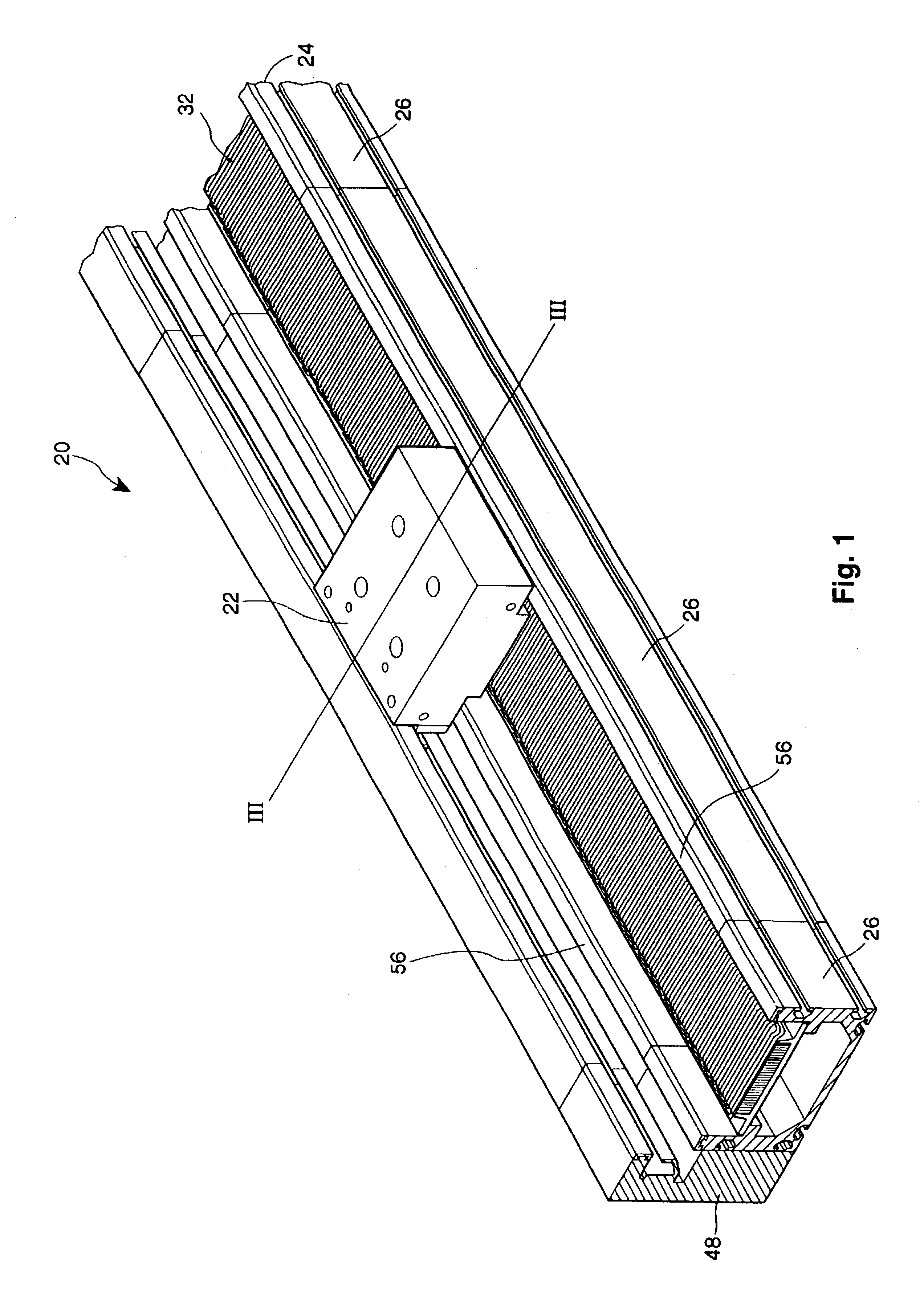
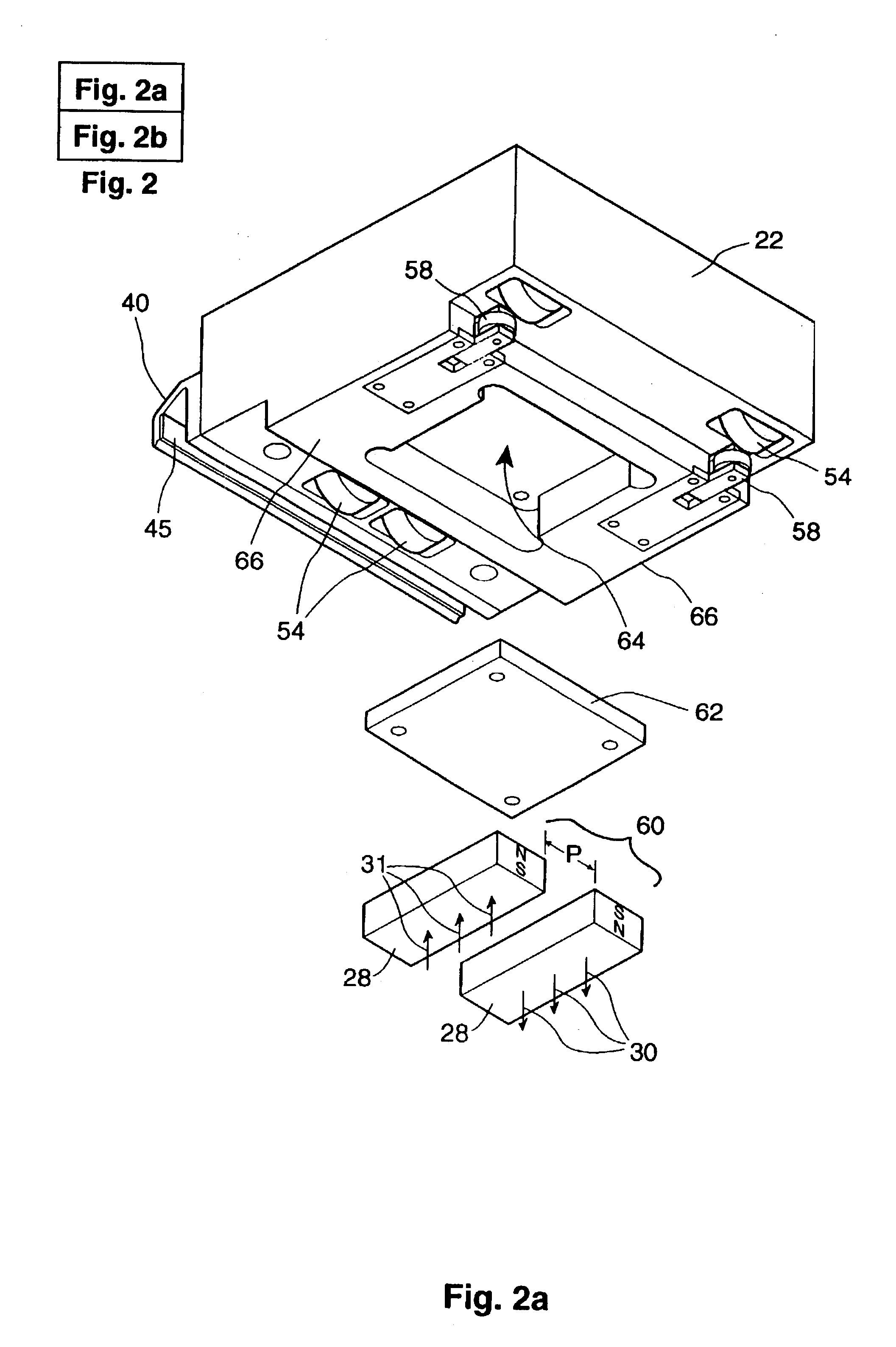
[0040]FIG. 1 illustrates a portion of a modular conveyor system 20, in accordance with the preferred embodiment. The system 20 features multiple pallets or moving elements 22 (only one is illustrated) which are constrained to ride or travel along a continuous, stationary, track 24.
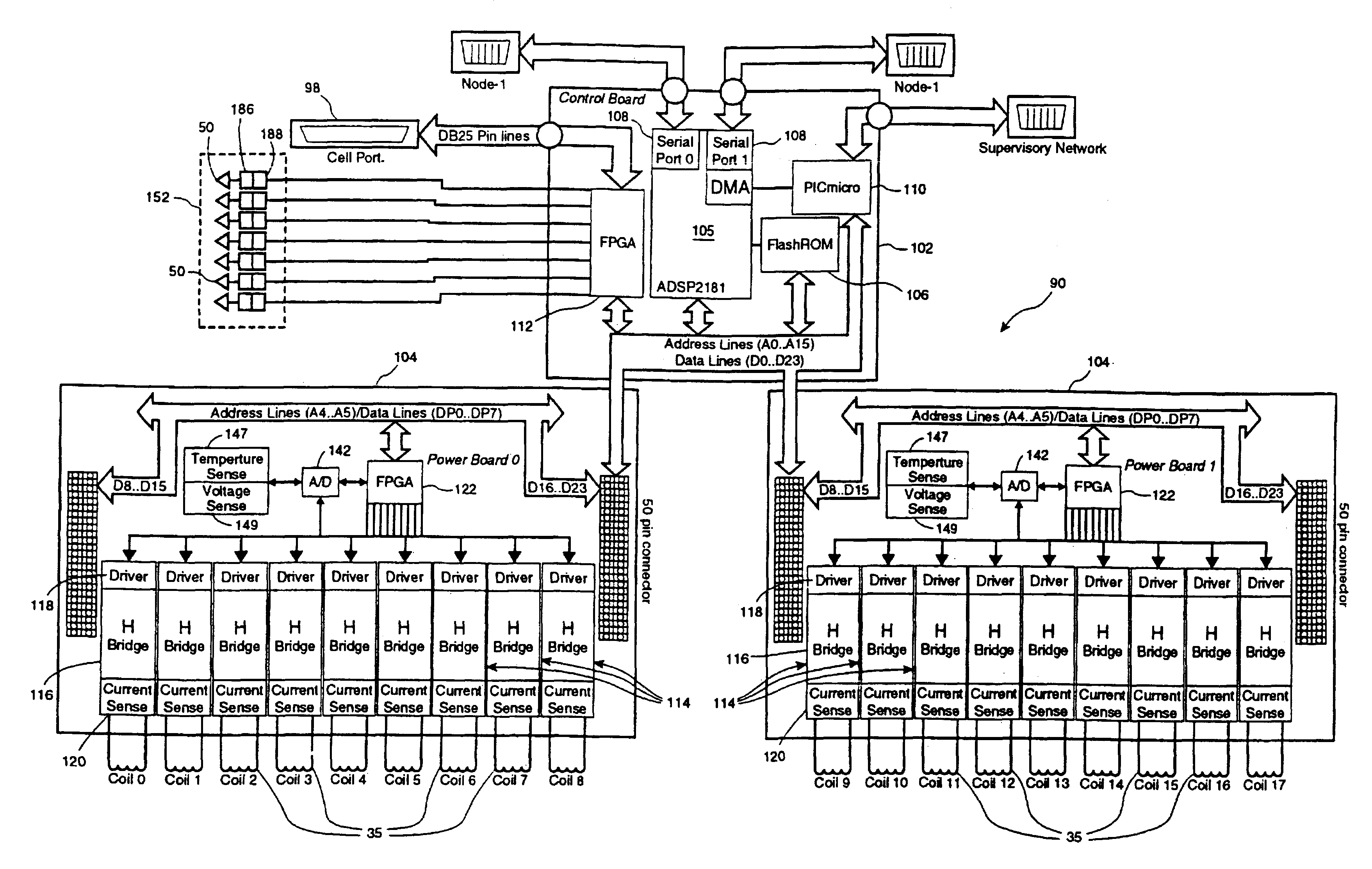
[0041]The description of the conveyor system 20 is organized as follows: (1) an introduction to the operating principles thereof; (2) brief description of the physical structure of the system, which comprises a plurality of track sections or units 26; (3) description of the preferred electromagnetic structure of the system; (4) introduction to a preferred distributed control architecture for control of the system; (5) detailed description of a preferred servocontrol system for each track unit 26; (6) detailed description of a preferred servocontrol subsystem for detecting the position of each pallet 22 along each track unit 26; (7) detailed description of a method according to the preferred embodiment for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More