

Three-dimensional environment perception method for mobile robot
A mobile robot and environment perception technology, which is applied in the directions of instruments, image data processing, and re-radiation, can solve the problems of expensive laser radar system, volume, and weight that are not suitable for mobile robot applications, and achieve good flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
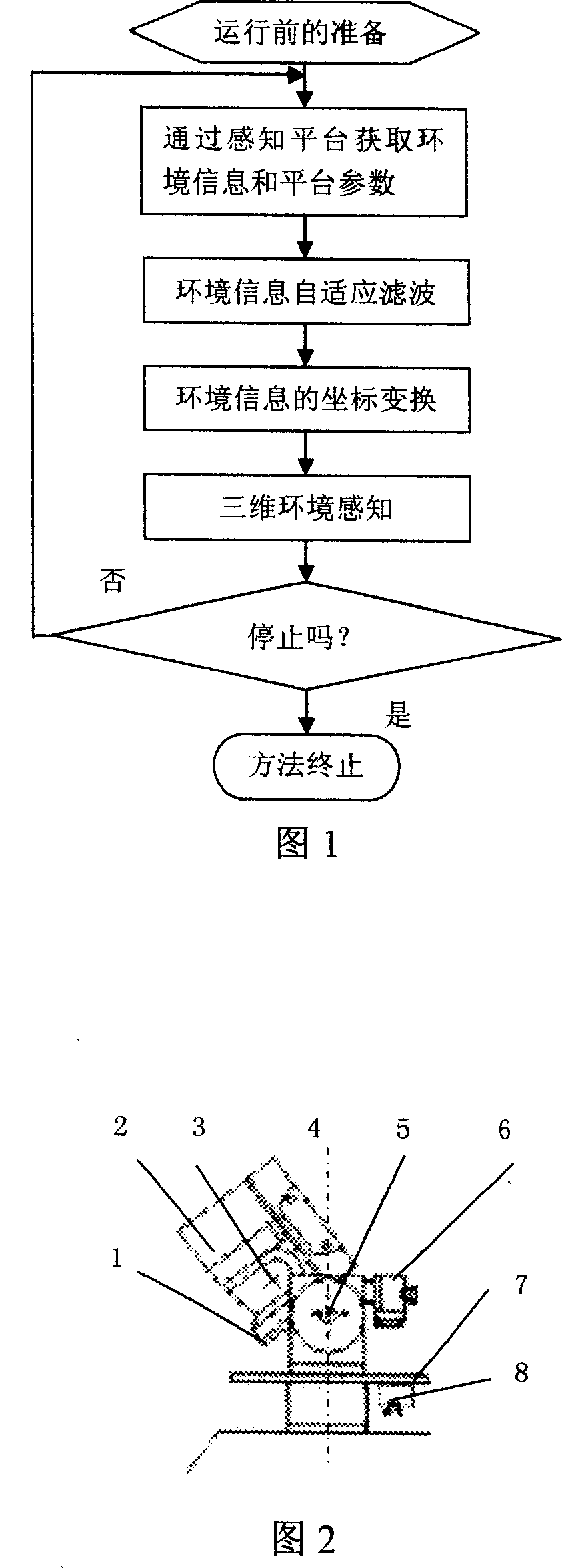
[0021] Accompanying drawing 2 is the schematic diagram of lidar and rotating pan-tilt, 1 is pitching and rotating pan-tilt, 2 is lidar, 3 is scanning optical center, 4 is horizontal rotation center, 5 is pitch rotation center, 6 is stepper motor, 7 is a horizontal rotary platform, and 8 is a stepper motor.
[0022] The two-dimensional laser radar 2 is loaded on the tilting and rotating platform 1, and the industrial computer (IPC) controls the laser radar 2 to rotate in the vertical direction around the pitching rotation center 5 through the stepping motor 6. The laser radar 2, the pitch rotation center 5, and the stepper motor 6 are all installed above the horizontal rotation platform 7, and the industrial computer (IPC) controls the laser radar to rotate in the horizontal direction around the horizontal rotation center 4 through the stepper motor 8. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More