

Finger joint for robot clever hand finger
A dexterous hand and robot technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of long transmission force space distance, drive system lag, poor position accuracy, etc., to reduce maintenance difficulty, high integration, and reduce maintenance. cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
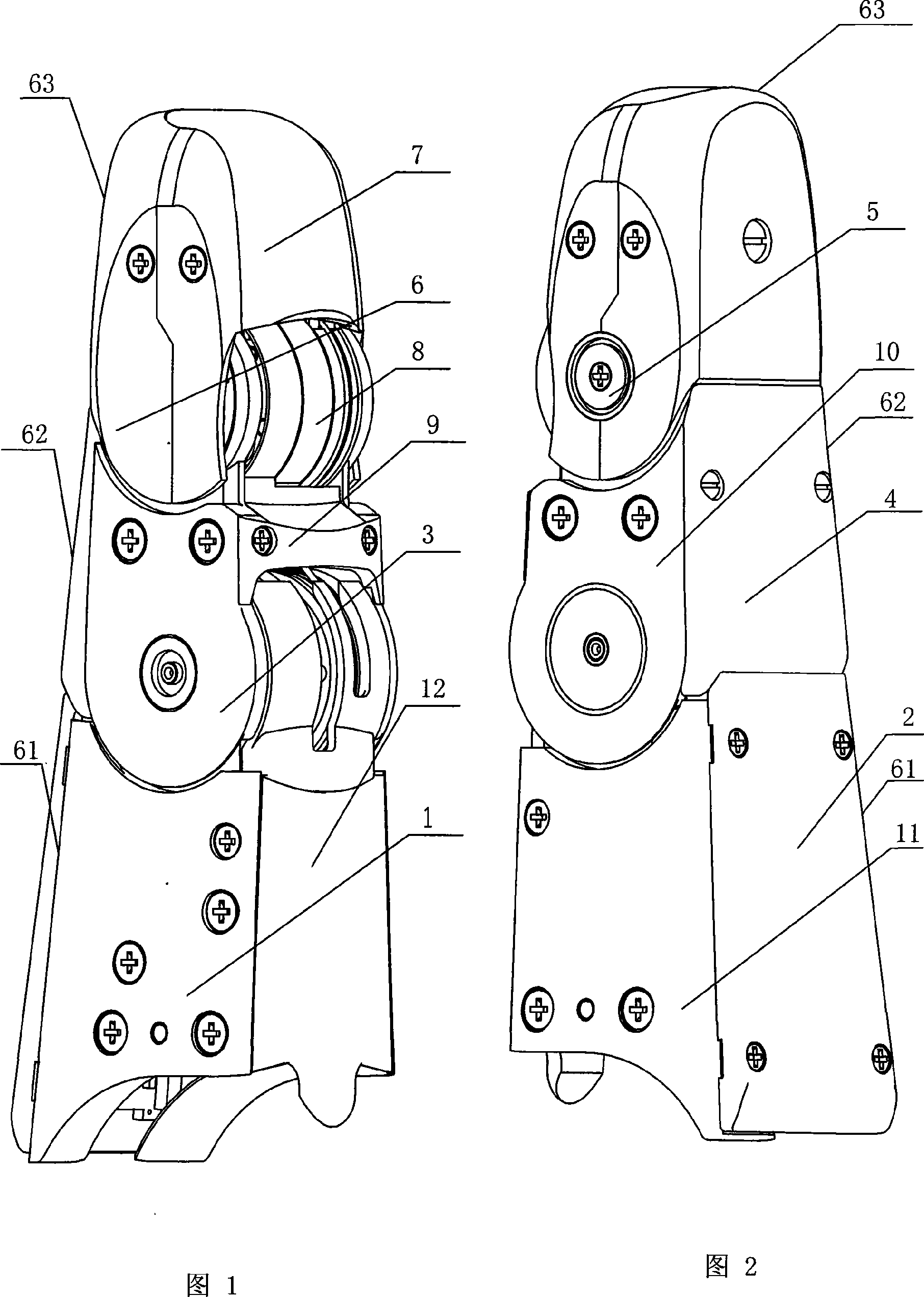
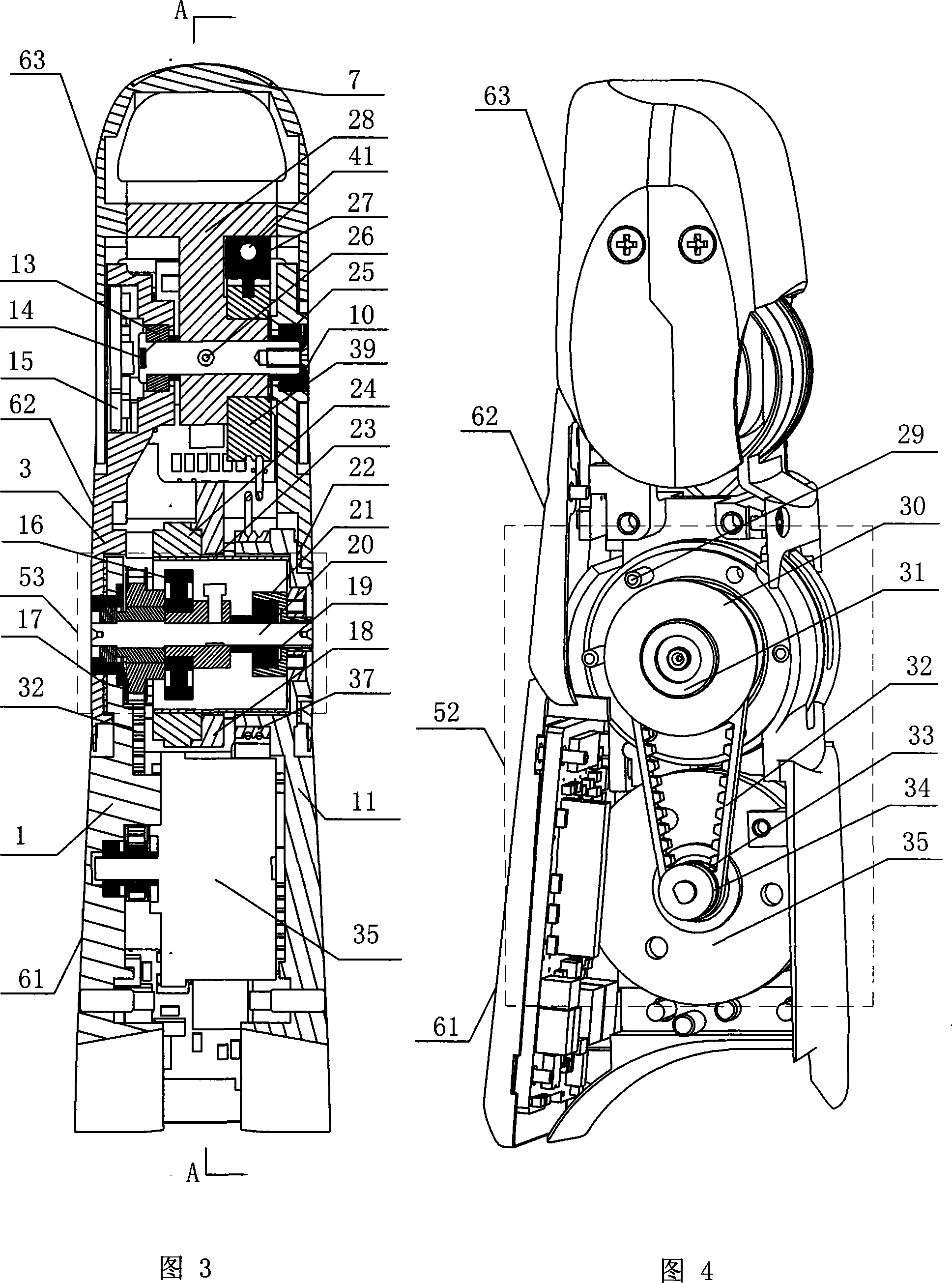
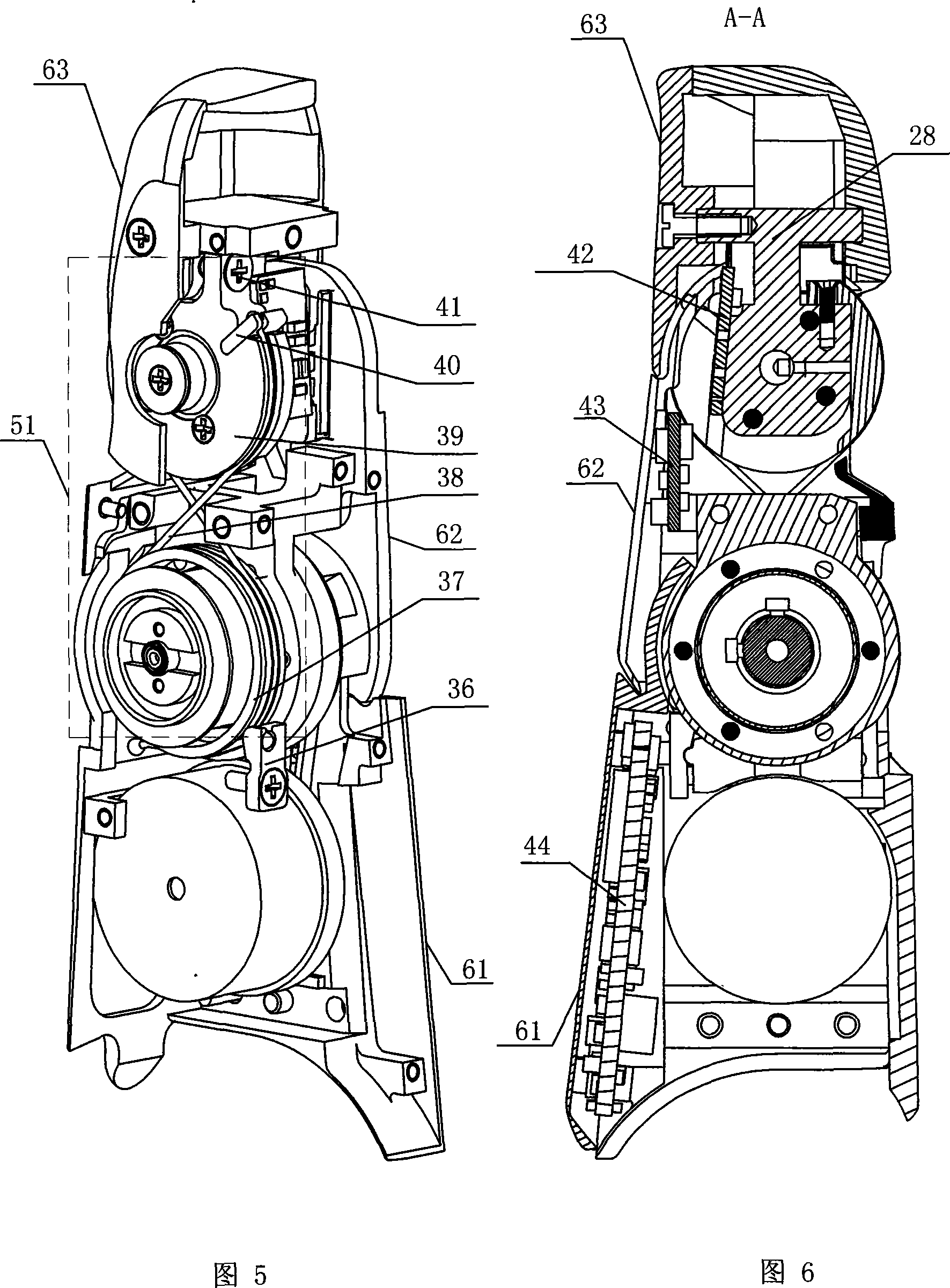
[0007] Embodiment 1: As shown in FIGS. 1 to 3 , the finger joints of the fingers of the robotic dexterous hand in this embodiment consist of a first knuckle shell 61 , a second knuckle shell 62 , an end knuckle shell 63 , and a first joint shaft 20 , second joint shaft 26, motor 35, fingertip one-dimensional torque sensor 28, steel wire coupling transmission mechanism 51, belt transmission mechanism 52, harmonic speed reducer 53, transmission member 18; The lower end of the two-knuckle housing 62 is rotationally connected through the first joint shaft 20, and the upper end of the second knuckle housing 62 is rotationally connected with the lower end of the terminal knuckle housing 63 through the second joint shaft 26; the motor 35 is fixed on the first On the first knuckle left side plate 1 of the knuckle housing 61, the first synchronous pulley 34 in the belt transmission mechanism 52 is fixed on the output shaft of the motor 35, and the second synchronous pulley 31 in the bel...
specific Embodiment approach 2
[0009] Specific embodiment two: as shown in Figure 1 and Figure 2, the first knuckle shell 61 described in this embodiment consists of the first knuckle left side plate 1, the first knuckle right side plate 11, the first knuckle finger The belly cover 12 and the first knuckle upper cover 2 are composed, the left side of the first knuckle finger belly cover 12 and the left side of the first knuckle upper cover 2 pass through the first knuckle The left side plate 1 is fixedly connected; the right side of the first knuckle cover plate 12 is fixedly connected with the right side of the first knuckle upper cover plate 2 through the first knuckle right side plate 11 . The stable connection of the first phalanx can be realized, and the drive motor 35 and the circuit board 44 can be enclosed inside the phalanx without being exposed outside. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0010] Specific embodiment three: as shown in Figure 1 and Figure 2, the second knuckle shell 62 described in this embodiment consists of the second knuckle left side plate 3, the second knuckle right side plate 10, the second knuckle finger Belly cover 9 and second knuckle upper cover 4, the left side of the second knuckle finger belly cover 9 and the left side of the second knuckle upper cover 4 pass through the left side of the second knuckle The side plate 3 is fixedly connected; the right side of the second knuckle cover plate 9 is fixedly connected with the right side of the second knuckle upper cover plate 4 through the second knuckle right side plate 10 . With such a structure, a stable connection of the first phalanx can be realized, and other components and connection relations are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More