Submarine manipulator wrist joint structure with three degrees of freedom
A technology of underwater manipulators and wrist joints, applied to manipulators, underwater operating equipment, ships, etc., can solve problems such as not given, and achieve the effect of simple mechanism, reasonable layout, and flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention is described in more detail below in conjunction with accompanying drawing example:
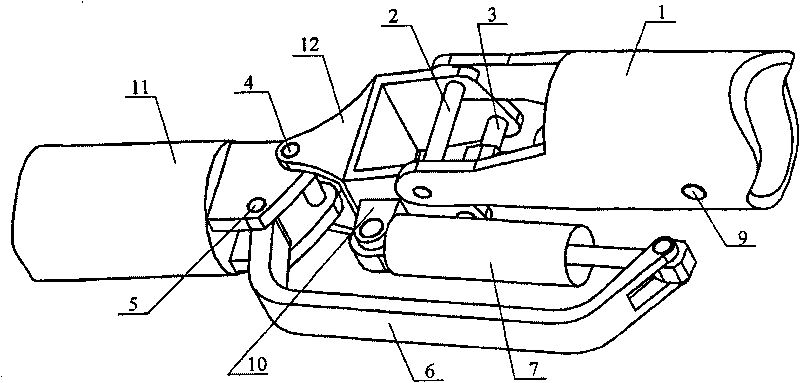
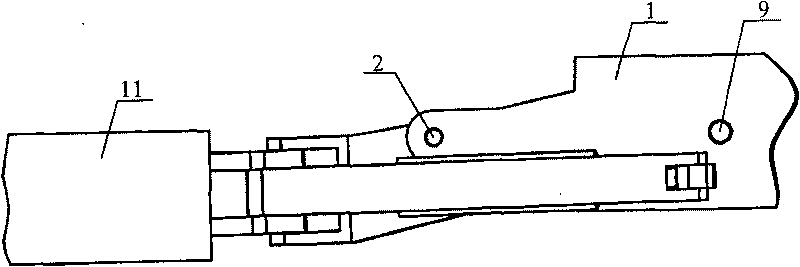
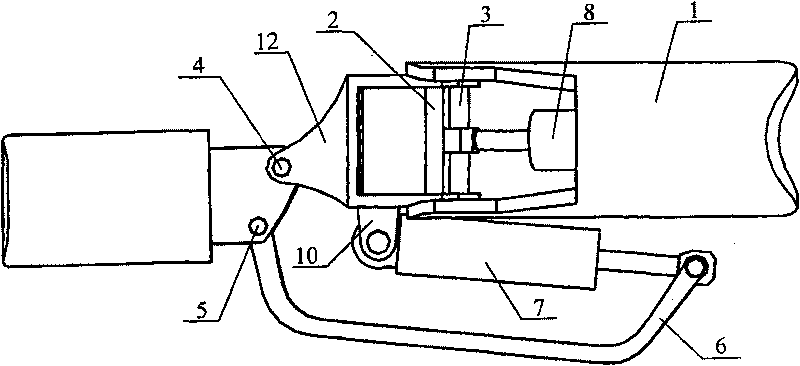
[0018] combine Figure 1-Figure 3 , the three-degree-of-freedom wrist joint structure of the underwater manipulator consists of forearm 1, wrist joint pitch rotation axis 2, hydraulic cylinder piston rod coupling axis 3, wrist joint yaw rotation axis 4, connecting rod coupling axis 5, connecting rod 6, the first hydraulic pressure Cylinder 7, the second hydraulic cylinder 8, the connecting shaft 9 at the bottom end of the hydraulic cylinder, the fixed seat 10 at the bottom end of the hydraulic cylinder, the wrist 11 and the connecting frame 12, wherein the connecting frame 12 passes through the wrist joint pitch rotation axis 2, the wrist joint yaw The rotating shaft 4 is connected with the forearm 1 and the wrist 11 respectively; the bottom end of the second hydraulic cylinder 8 in the forearm 1 is installed on the coupling shaft 9 at the bottom end of the hydrau...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More