

Positioning apparatus of robot puncturing hole in endoscope operation and locating method
A surgical robot and positioning device technology, applied in the field of robotics, can solve the problems of large amount of double-target fixed data processing, slow computer system operation, slow system operation, etc., achieves rapid puncture hole calibration process, facilitates product development and production, and improves The effect of calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0127] The present invention is described in more detail below in conjunction with accompanying drawing example:
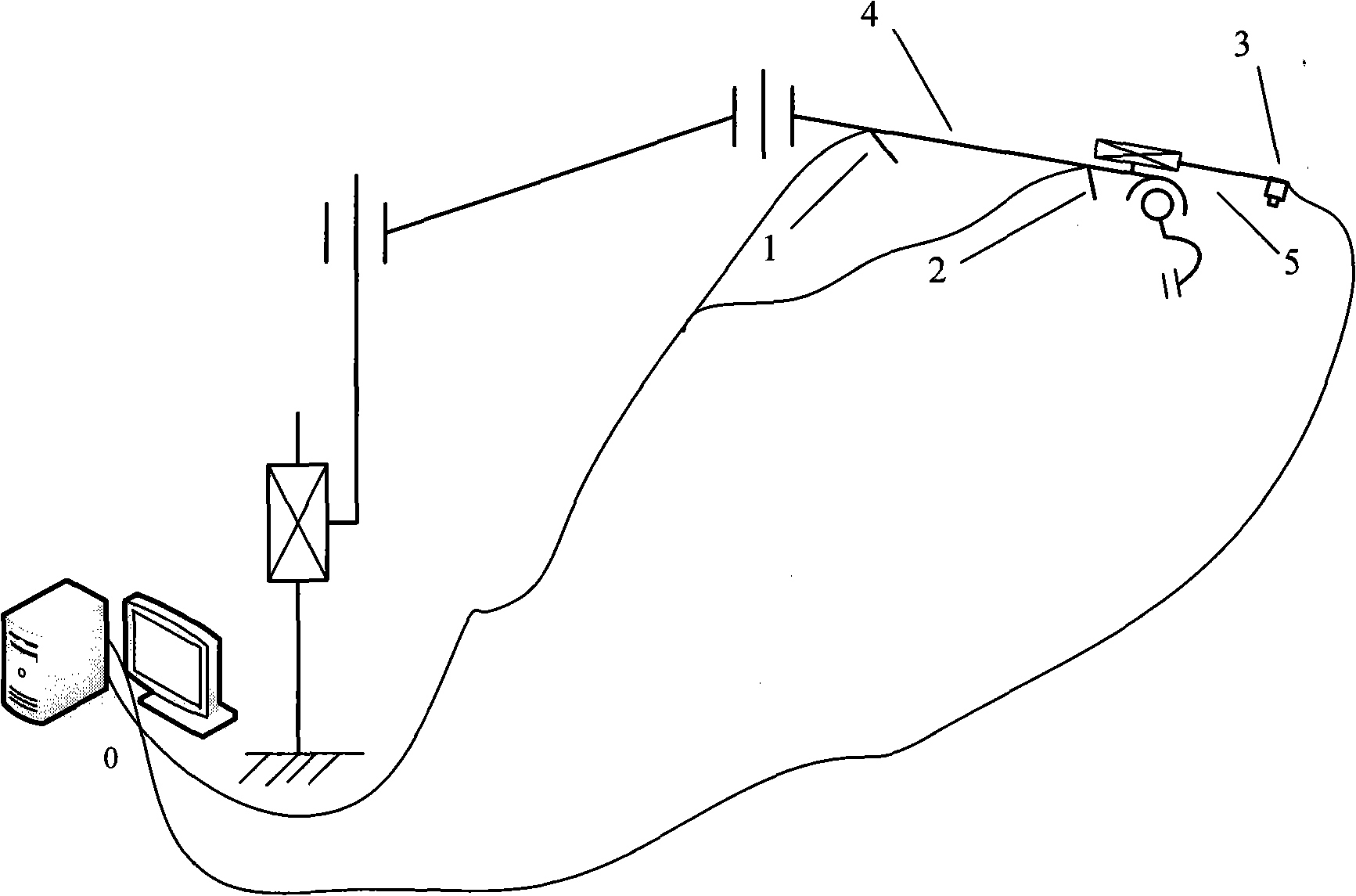
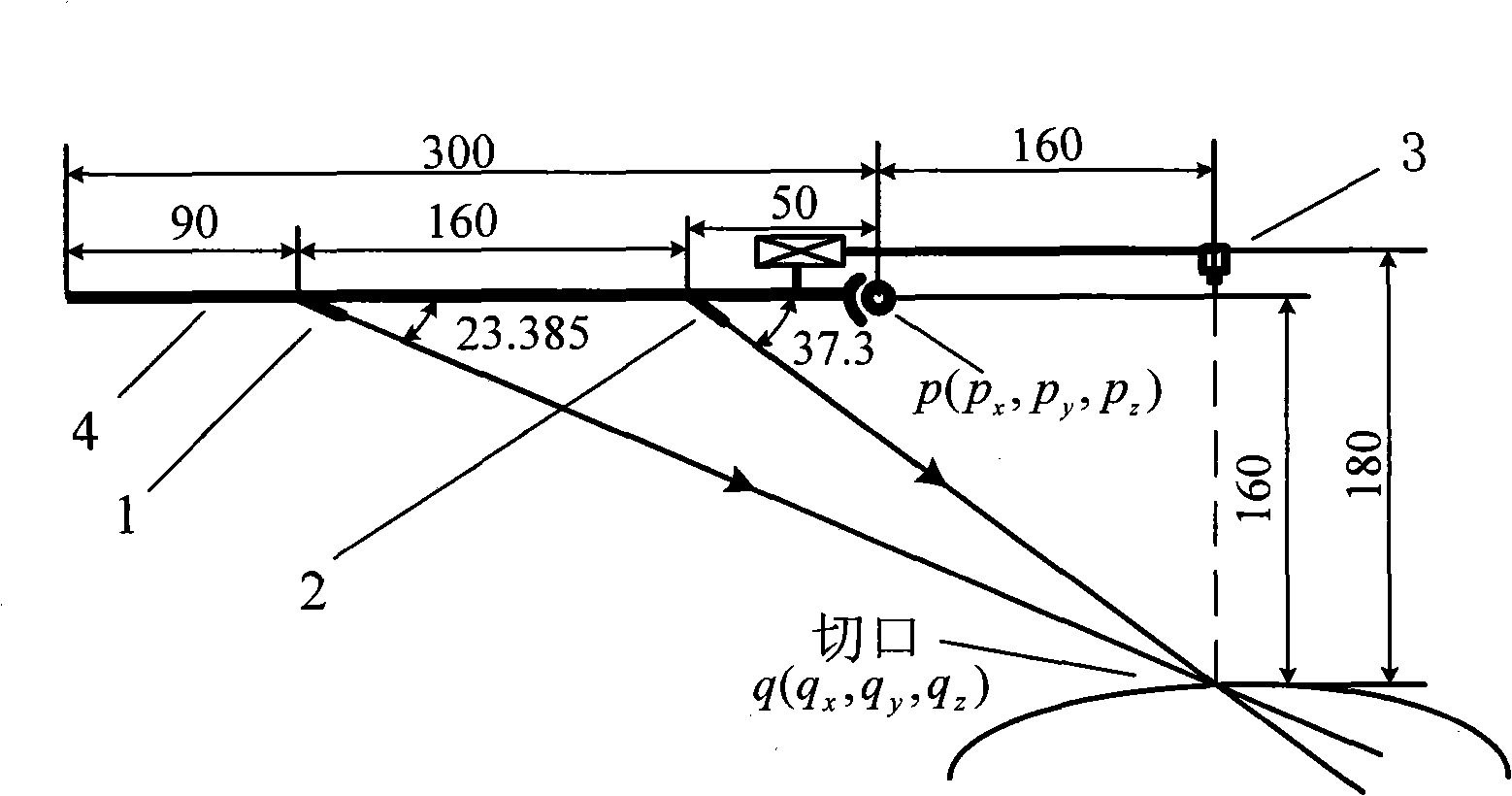
[0128] to combine figure 1 , the composition of the puncture hole positioning device of the endoscope-operated surgical robot of the present invention includes: a telescopic connecting rod 5 installed on the mechanical arm 4 at the end of the robot, a miniature CCD camera 3 is installed at the end of the telescopic connecting rod, and a mechanical end of the robot There are two red spot-like spot lasers 1 and 2 installed under the arm. The light emitted by the two red spot-like spot lasers intersects on the optical axis directly below the camera. PC machine 0 is connected. The inclination angles of the two red spot lasers are different, one red spot laser has a tilt angle of 23.385°, and the other red spot spot laser has a tilt angle of 37.3°.
[0129] After the laparoscopic surgery puncture hole positioning process begins, the industrial PC first controls the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More