

Micro-wound operation robot based on endoscopic
A technology of surgical robot and endoscope, applied in internal fixator, micro-manipulator, small surgical forceps, etc., can solve the problems of difficult organ resection and inability to achieve intraluminal suturing, etc., and achieve weight reduction, volume reduction, and operation light and flexible effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The minimally invasive surgery robot based on the endoscope of the present invention will be further described in detail below with reference to the accompanying drawings and specific examples.
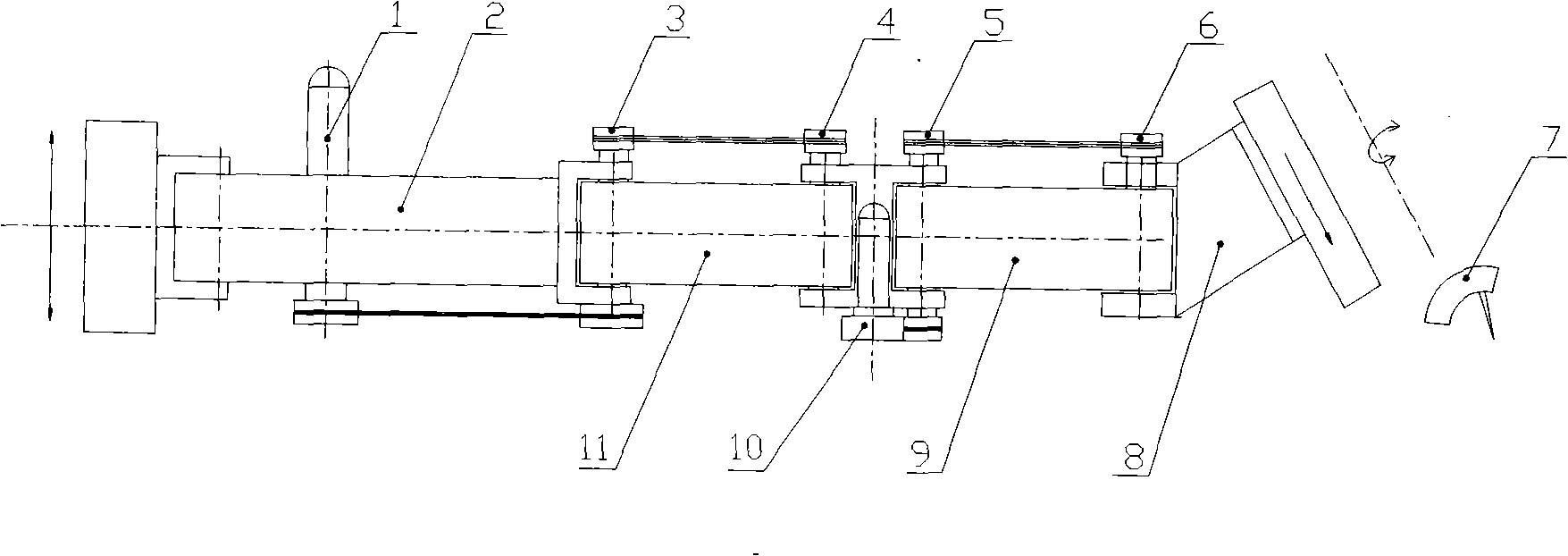
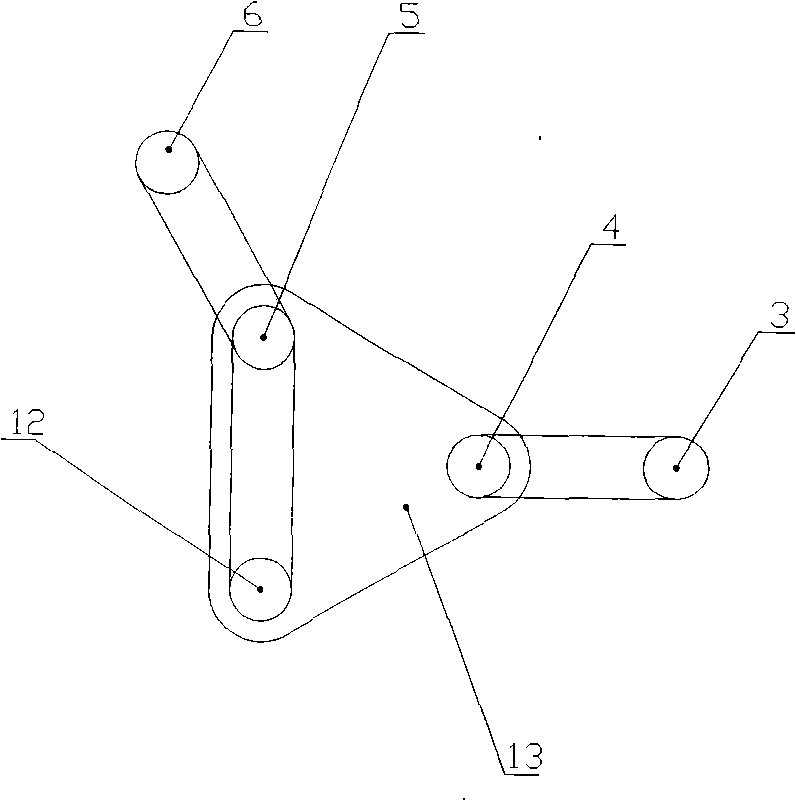
[0044] exist figure 1 , 2 Among them, the double four-bar linkage mechanism is realized by wire transmission. The double four-bar linkage mechanism includes a first joint 3 connecting the boom and the second forearm, a second joint 4 connecting the second forearm and the transition frame, a third joint 12 connecting the second motor 10 and the transition frame, The fourth joint 5 that connects the transition frame and the first forearm, and the fifth joint 6 that connects the first forearm and the support of the inclined table.
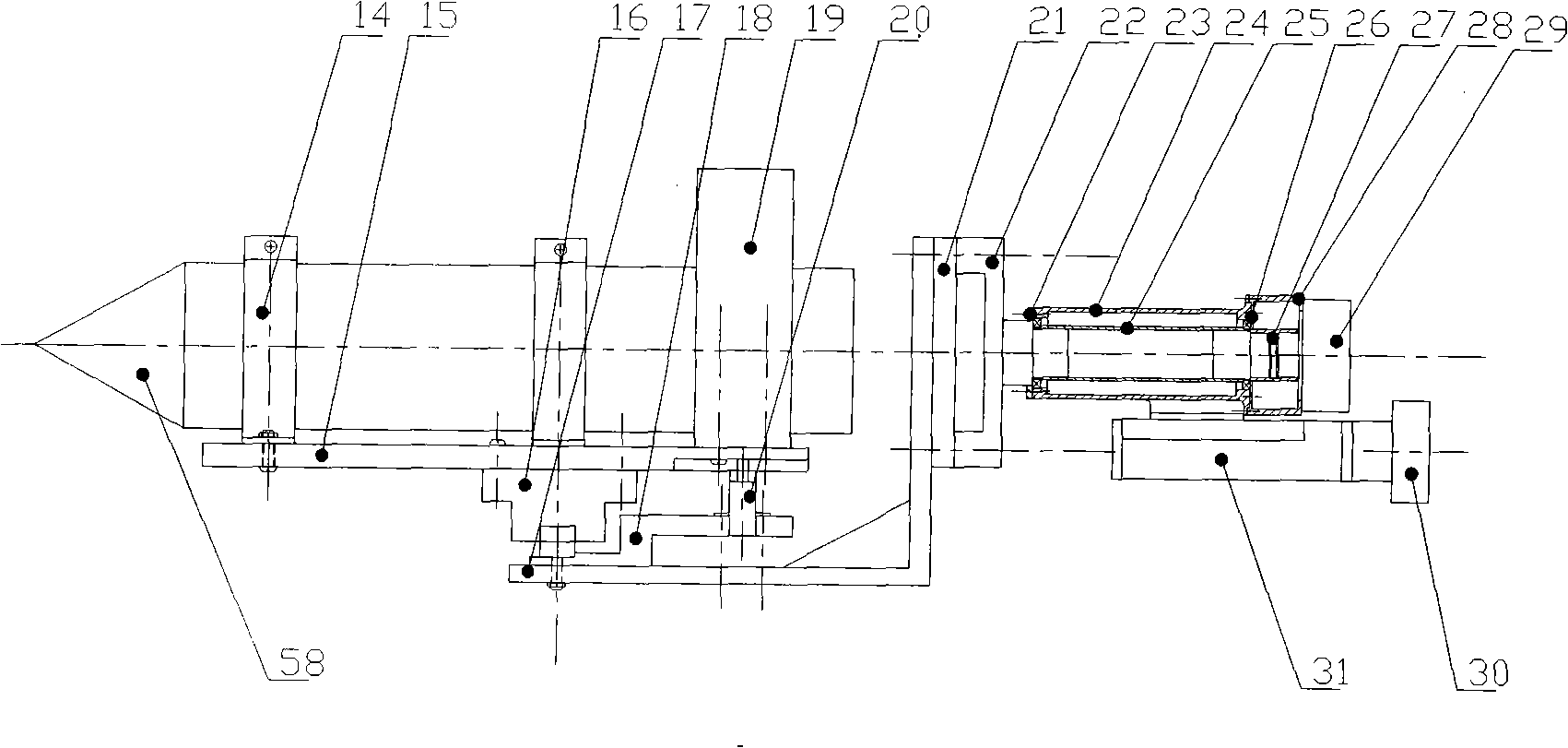
[0045] exist image 3Among them, the finger arc movement joint mechanism of the attitude adjustment part is an active joint, and the joint movement is provided by the third stepping motor 19, which is realized through the rack and pinion mechanism. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More