

Method and device for controlling upper body attitude of apery robot stabilized walking
A humanoid robot and attitude control technology, applied in attitude control, measuring devices, position/direction control, etc., can solve the problems of unfavorable real-time control, large compensation time delay, and difficulty in solving, etc., and achieve small time delay and maintain dynamics Balanced, wide-ranging effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
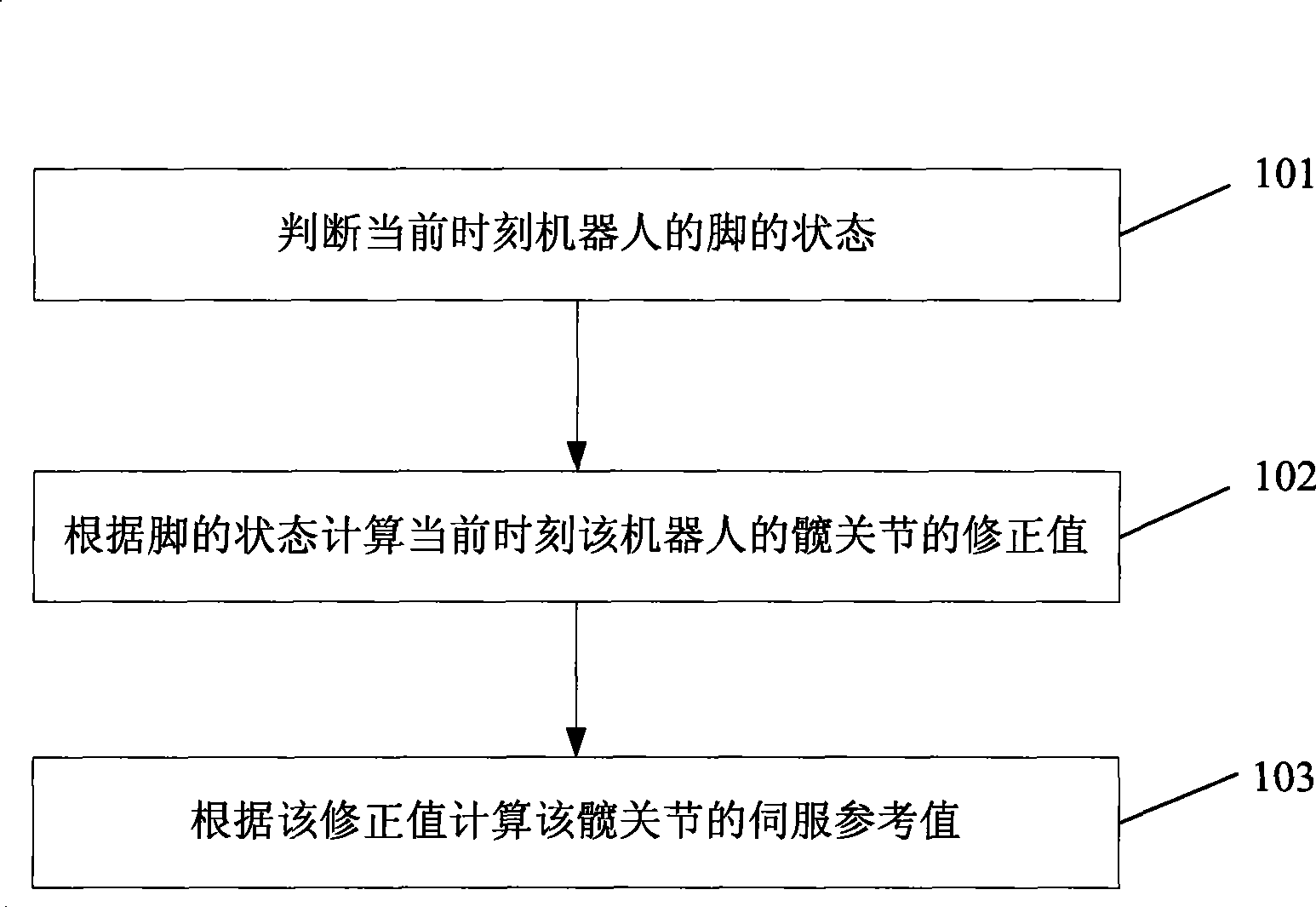
[0026] see figure 1 , the present embodiment provides a method for controlling the upper body posture of a humanoid robot for stable walking, the method realizes stable walking of the humanoid robot by adjusting the hip joint, including:
[0027] Step 101: Judging the state of the robot's feet at the current moment, the state of the feet is a supporting state or a swinging state;
[0028] Step 102: Calculate the correction value of the robot's hip joint at the current moment according to the state of the feet;
[0029] Step 103: Calculate the servo reference value of the hip joint according to the correction value, and the servo reference value is used to drive the hip joint to adjust the upper body posture of the robot.
[0030] In this embodiment, the posture of the upper body is adjusted by adjusting the hip joints to achieve the goal of stable walking of the humanoid robot. It does not require a specific mathematical model of the robot, has a wide range of applications, i...
Embodiment 2
[0053] see Figure 4 , an upper body posture control device for stable walking of a humanoid robot, characterized in that the device includes:
[0054] Judging module 401, used to judge the state of the foot of the robot at the current moment, the state of the foot is a support state or a swing state;
[0055] The first computing module 402 is used to calculate the correction value of the hip joint of the robot at the current moment according to the state of the foot judged by the judging module 401;
[0056] The second calculation module 403 is used to calculate the servo reference value of the hip joint according to the correction value obtained by the first calculation module 402, and the servo reference value is used to drive the hip joint to adjust the upper body posture of the robot.
[0057] specifically,
[0058] see Figure 5 , the judging module 401 includes:
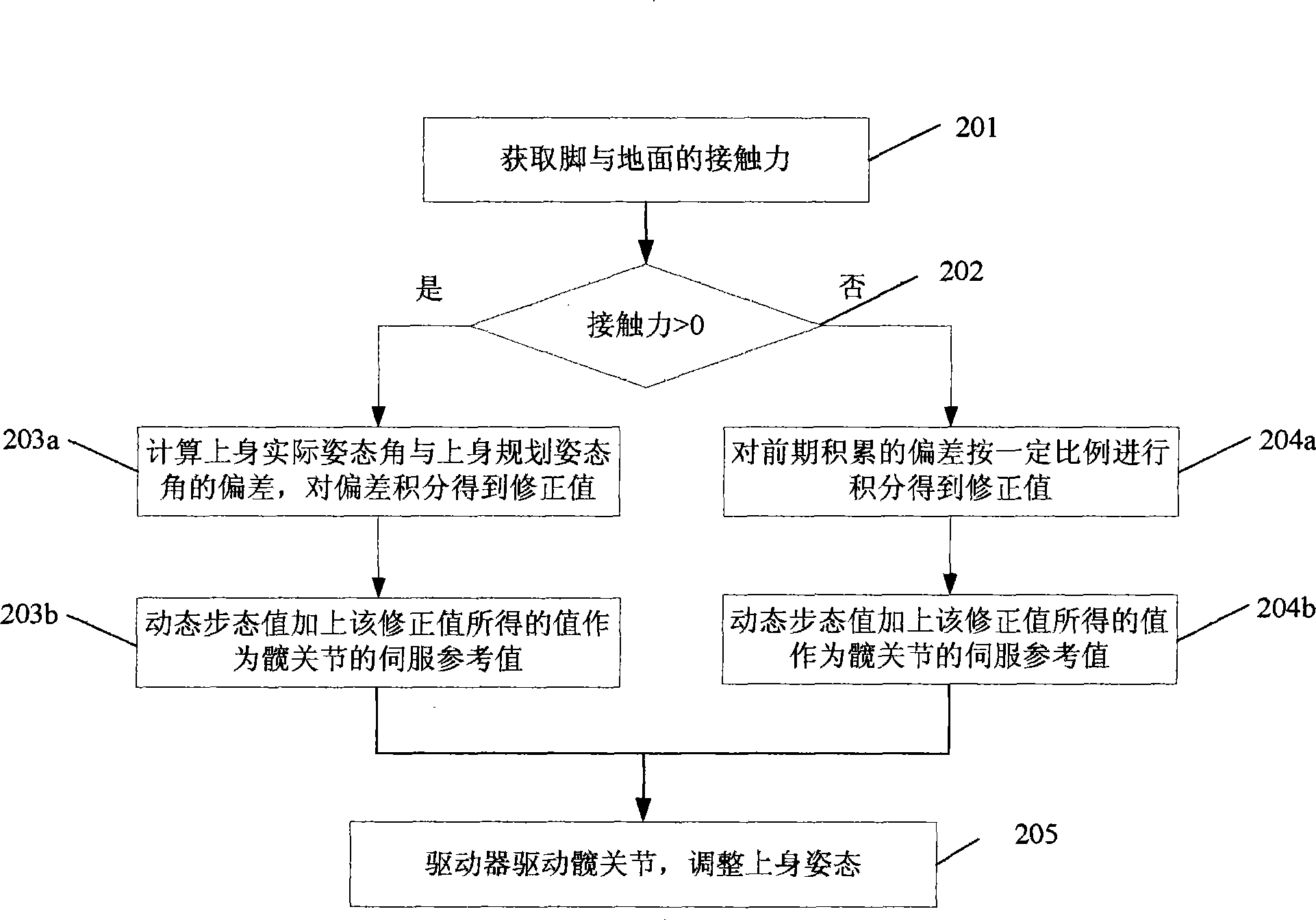
[0059] An acquisition unit 401a, configured to acquire the contact force between the robot's feet and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More