

Method for recognizing manually-set road sign in agricultural machine visual navigation
An identification method and technology for agricultural machinery, applied in navigation, mapping and navigation, character and pattern recognition, etc., can solve problems such as large constraints, low operating efficiency, poor stability, etc., and achieve strong environmental adaptability and navigation recognition accuracy. High and fast operation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
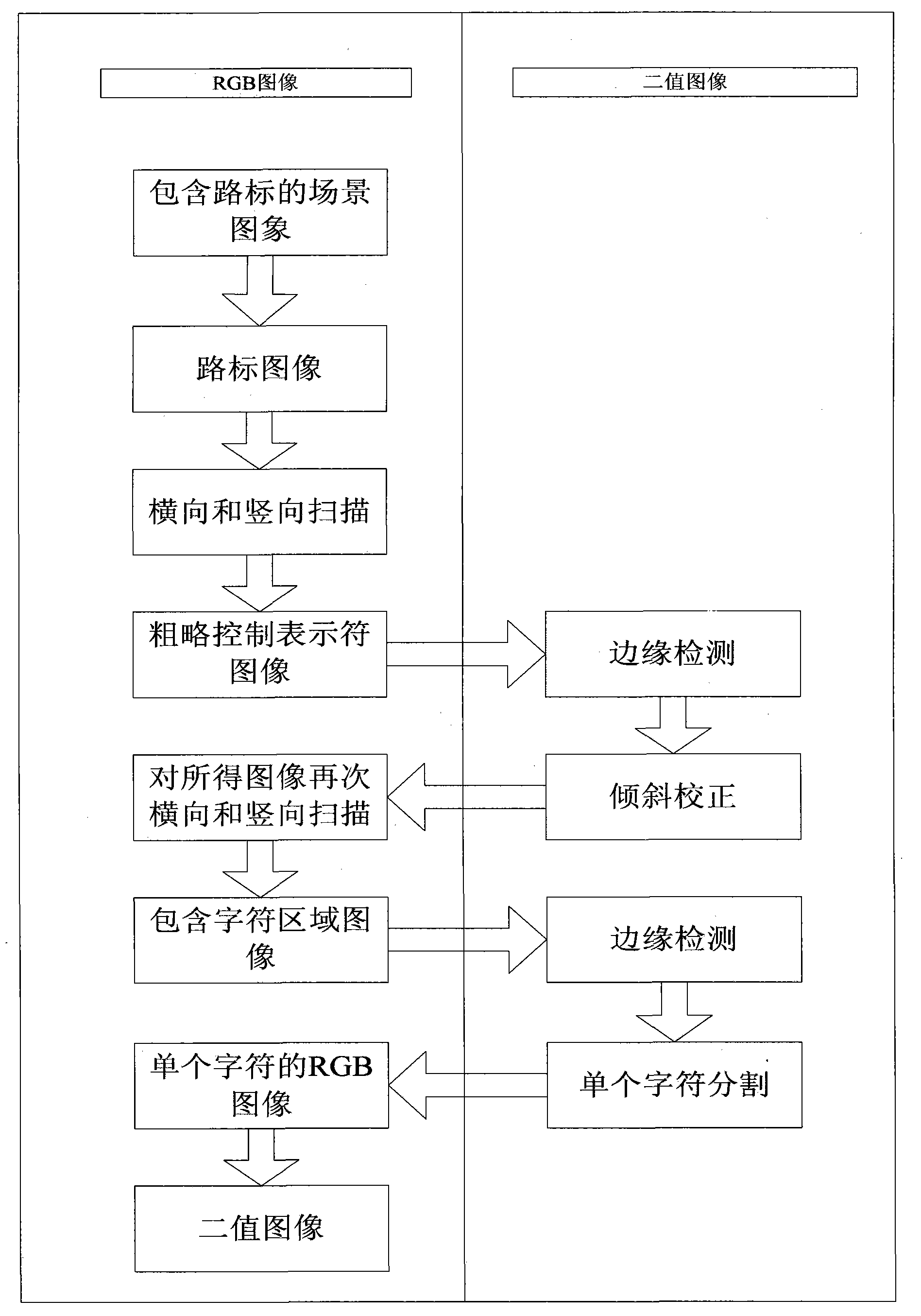
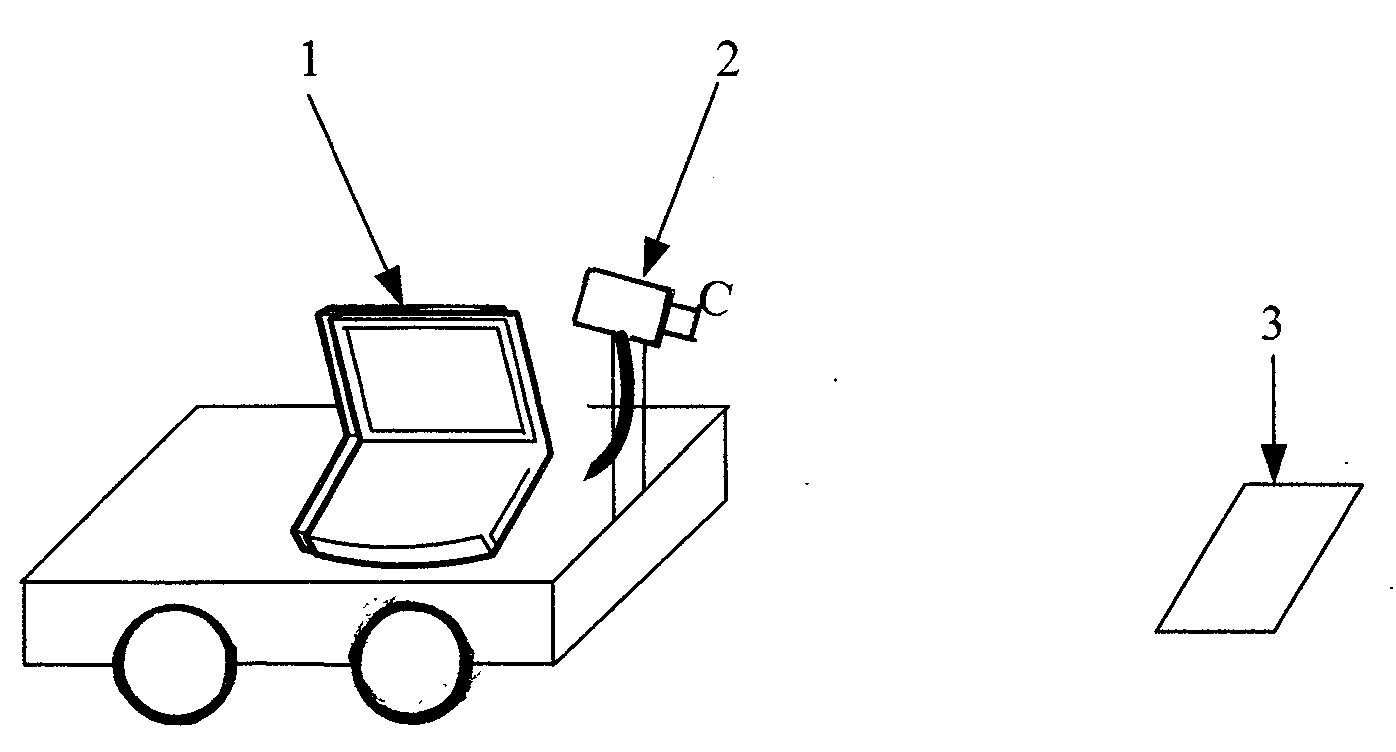
[0035] like figure 2 As shown, this embodiment is the situation that the method of the present invention is used in the farmland harvesting operation environment. According to the environmental information of the farmland, the road sign 3 is designed to be blue in color, rectangular, and its aspect ratio is 2:1, and the control character TR30 on the road sign is designed to be white. Manually lay the road sign flat on the ground. Use the Tianmin USB interface CCD camera 2 installed on the farmland machinery to capture the scene image of the road sign. The optical center of the CCD camera and the ground plane form an angle of 45 degrees, and transmit the collected road sign image to the industrial computer 1 ( Its processor is P43.0GH Z ), the processing of images collected by the camera, the semantic recognition of control characters and the communication with each control module are completed by the industrial computer. The specific identification method is as follows:
...
Embodiment 2
[0041] This embodiment is the situation that the wood invention method is used in the orchard operating environment. According to the environmental information of the orchard, artificially hang the road sign 3 on the lower branches, and use figure 2 The identification system shown in the figure performs identification, and the specific identification method is the same as that in Embodiment 1. In this example, we use the WK1 control character to represent the execution of actions on the space around the signpost.
[0042] Similarly, the recognition of the control characters of all road signs can be completed.
Embodiment 3
[0044] This embodiment is the situation of the method of the present invention in the lawn operation environment. According to the environmental information of the lawn, the road signs are manually placed at the key points where the robot passes, so that the plane of the road signs is placed perpendicular to the ground. use figure 2 The identification system shown in the figure performs identification, and the specific identification method is the same as that in Embodiment 1. In this example, we use the TR30 control character to represent the execution of actions on the space around the signpost.
[0045] Similarly, the recognition of the control characters of all road signs can be completed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More