

Minitype wheel/caterpillar structure-variable mobile-search reconnaissance robot
A mobile search and robot technology, applied in the field of new mobile robots, can solve the problems of low moving speed, huge robot, complex robot structure, etc., and achieve the effect of being easy to carry by a single person, strong obstacle surmounting ability, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
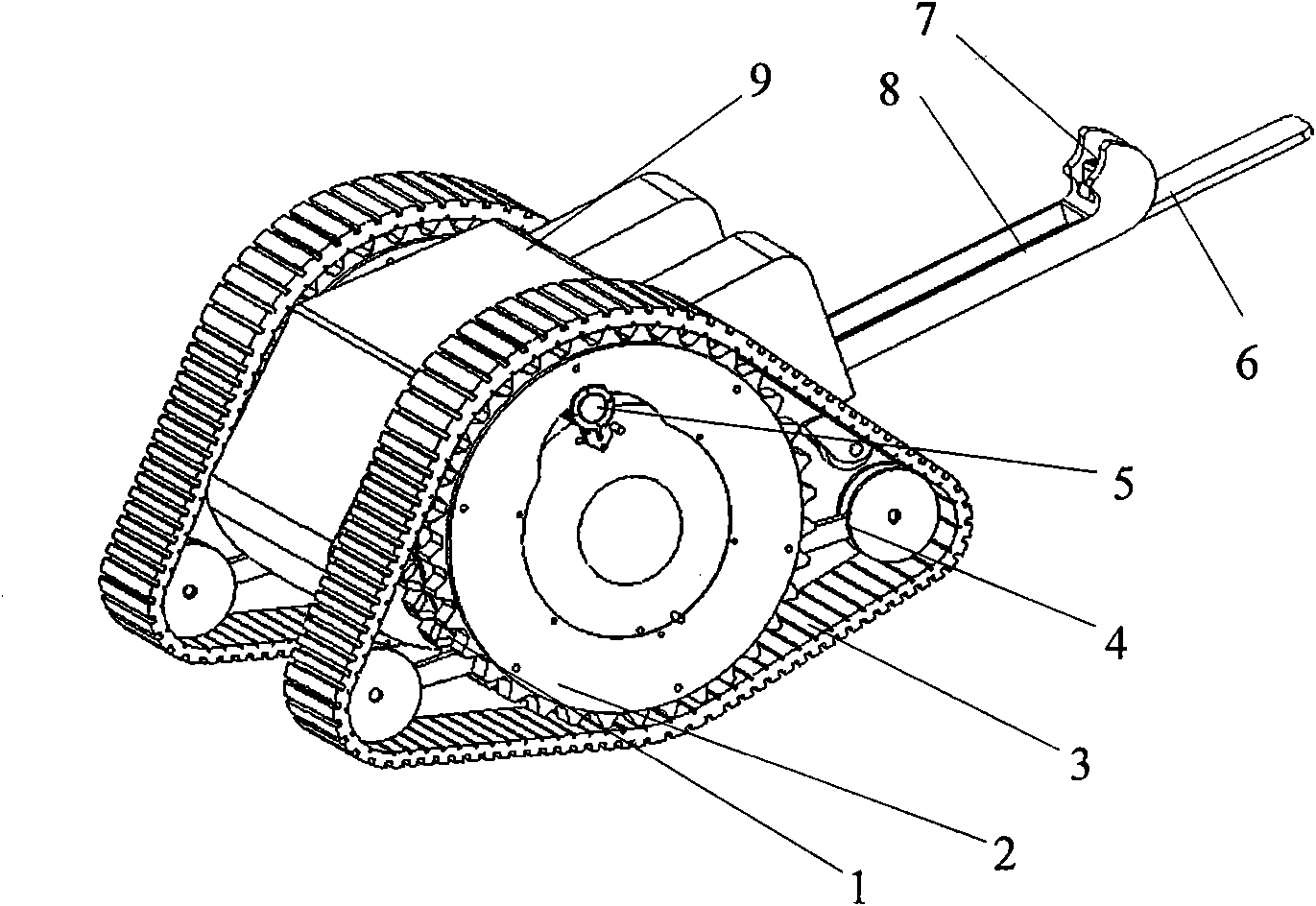
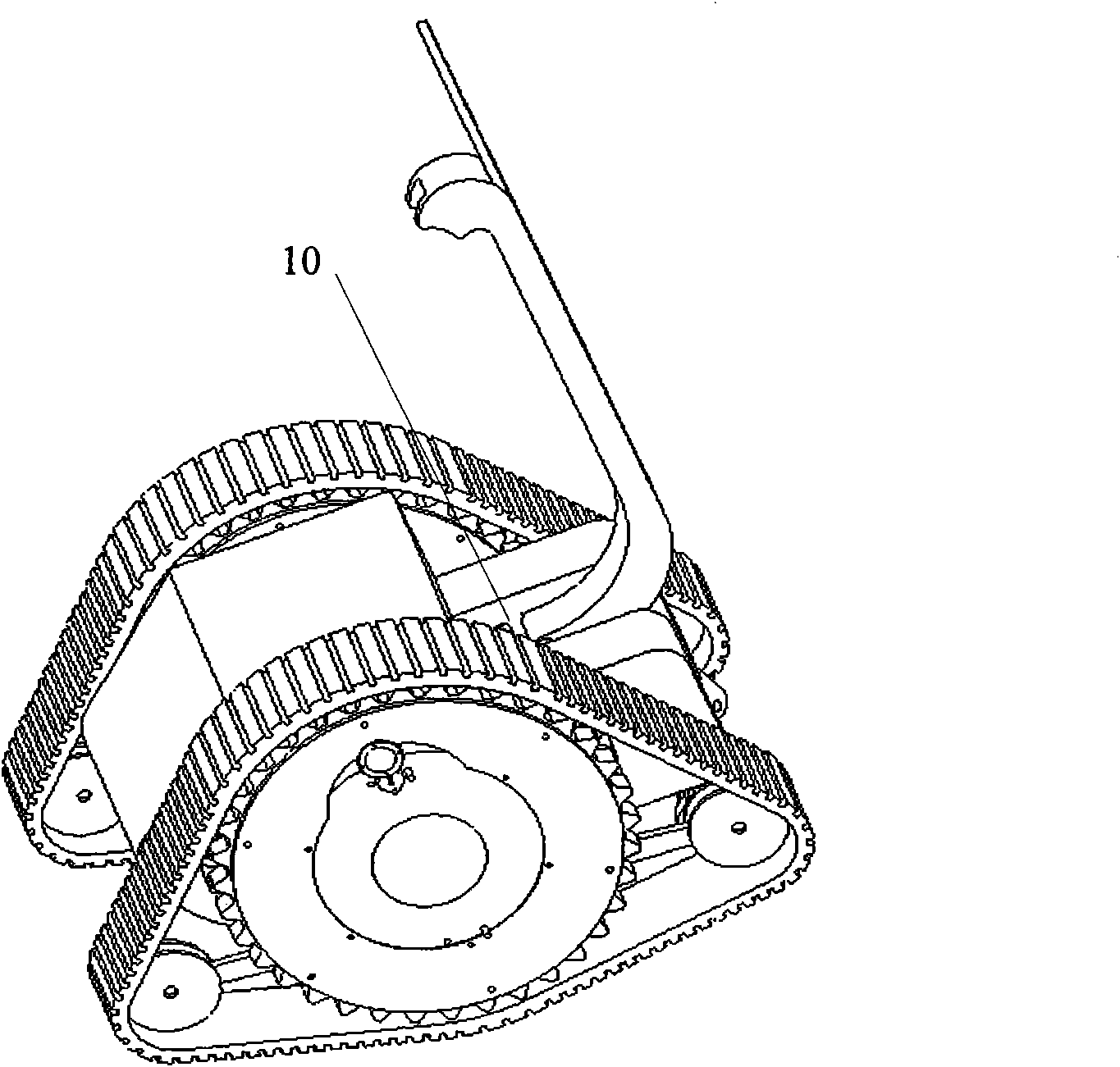
[0017] Embodiment 1: Combining the attached figure 1 and figure 2 The structural features that the mobile robot that uses the wheel / track change structure movement principle and method thereof in the present invention should include: an inner wheel 1 with teeth, an outer wheel 2 with teeth, a new type of elastic track 3, and a wheel / track change Mechanism 4, the gear 5 connected with the mobile driving motor, the elastic metal sheet 6, the surveillance camera 7, the tail swing rod 8, the robot body box 9 and the rotation shaft 10 of the tail swing rod 8 connected with the swing motor, in addition the robot system It also includes a computer control system and a remote control system of the robot body. The robot system has five motors in total, two of which drive the robot's wheel / shoe moving mechanism, which can realize the robot's forward, backward and turning; the other two motors respectively control the retraction and release of the robot's two sets of wheel / shoe moving ...
Embodiment approach 2
[0019] Embodiment 2: Combining the attached figure 1 and figure 2 The structural features that the mobile robot that uses the wheel / track change structure movement principle and method thereof in the present invention should include: an inner wheel 1 with teeth, an outer wheel 2 with teeth, a new type of elastic track 3, and a wheel / track change Mechanism 4, the gear 5 that is connected with the mobile drive motor, elastic metal sheet 6, reconnaissance camera 7, fork 8, the rotating shaft 10 of the tail fork 8 that robot body casing 9 and is connected with swing motor, in addition this robot system also Including the computer control system and the remote control system of the robot body. The robot system has five motors in total, two of which drive the robot's wheel / shoe moving mechanism, which can realize the robot's forward, backward and turning; the other two motors respectively control the retraction and release of the robot's two sets of wheel / shoe moving mechanisms a...
Embodiment approach 3
[0021] Embodiment 3: Combining the attached figure 1 and figure 2 The structural features that the mobile robot that uses the wheel / track change structure movement principle and method thereof in the present invention should include: an inner wheel 1 with teeth, an outer wheel 2 with teeth, a new type of elastic track 3, and a wheel / track change Mechanism 4, the gear 5 connected with the mobile driving motor, the elastic metal sheet 6, the surveillance camera 7, the tail swing rod 8, the robot body box 9 and the rotation shaft 10 of the tail swing rod 8 connected with the swing motor, in addition the robot system It also includes a computer control system and a remote control system of the robot body. The robot system has five motors in total, two of which drive the robot's wheel / shoe moving mechanism, which can realize the robot's forward, backward and turning; the other two motors respectively control the retraction and release of the robot's two sets of wheel / shoe moving ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More