

Reconfigurable cable-driven parallel manipulator and driving device thereof
A technology of flexible cable drive and drive device, applied in the directions of manipulators, program-controlled manipulators, joints, etc., can solve the problems of flexible cables falling off and ropes entangled with each other, and achieve the effect of avoiding mutual entanglement, improving efficiency and simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The invention will be further described in detail below in conjunction with the accompanying drawings.
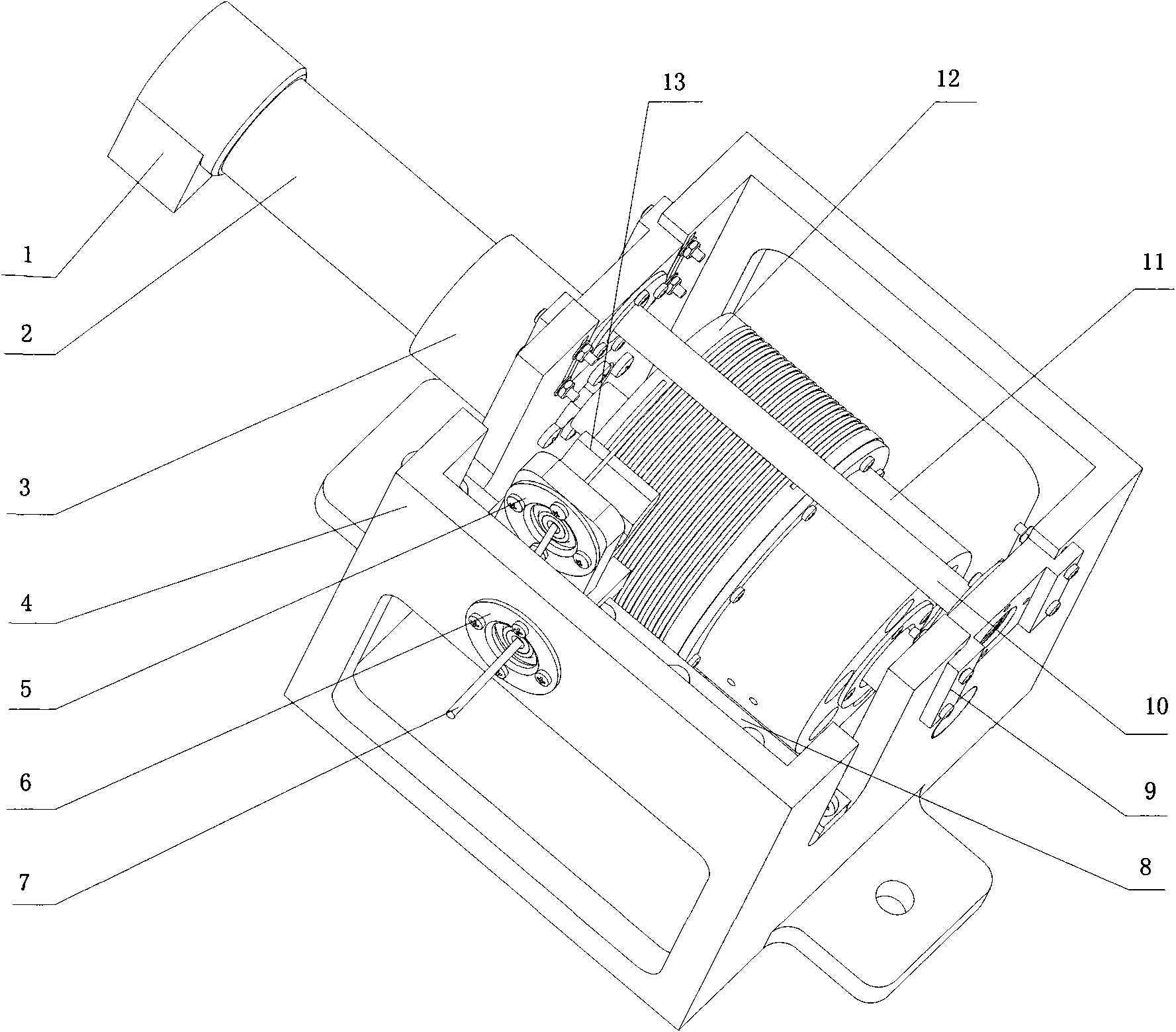
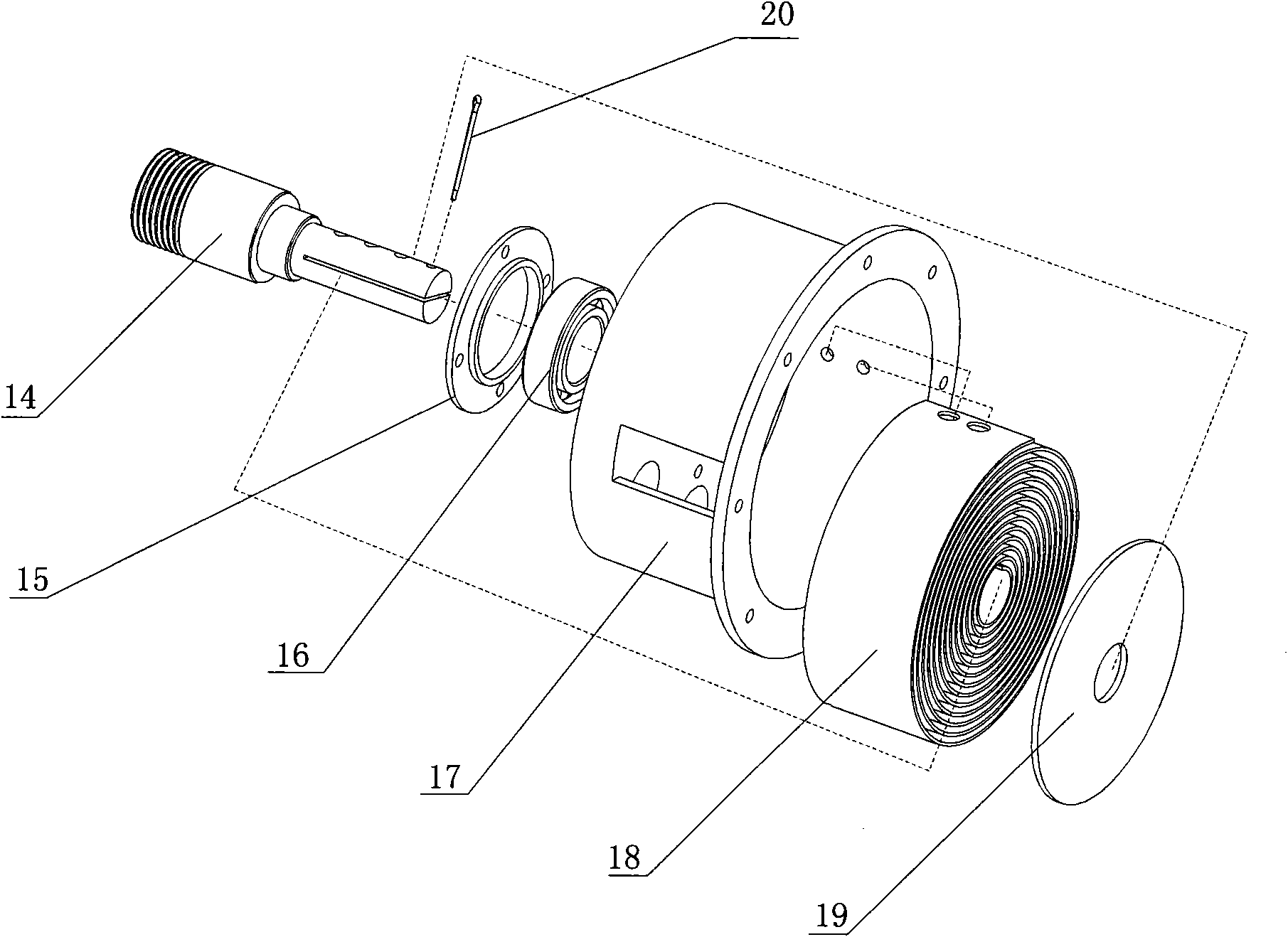
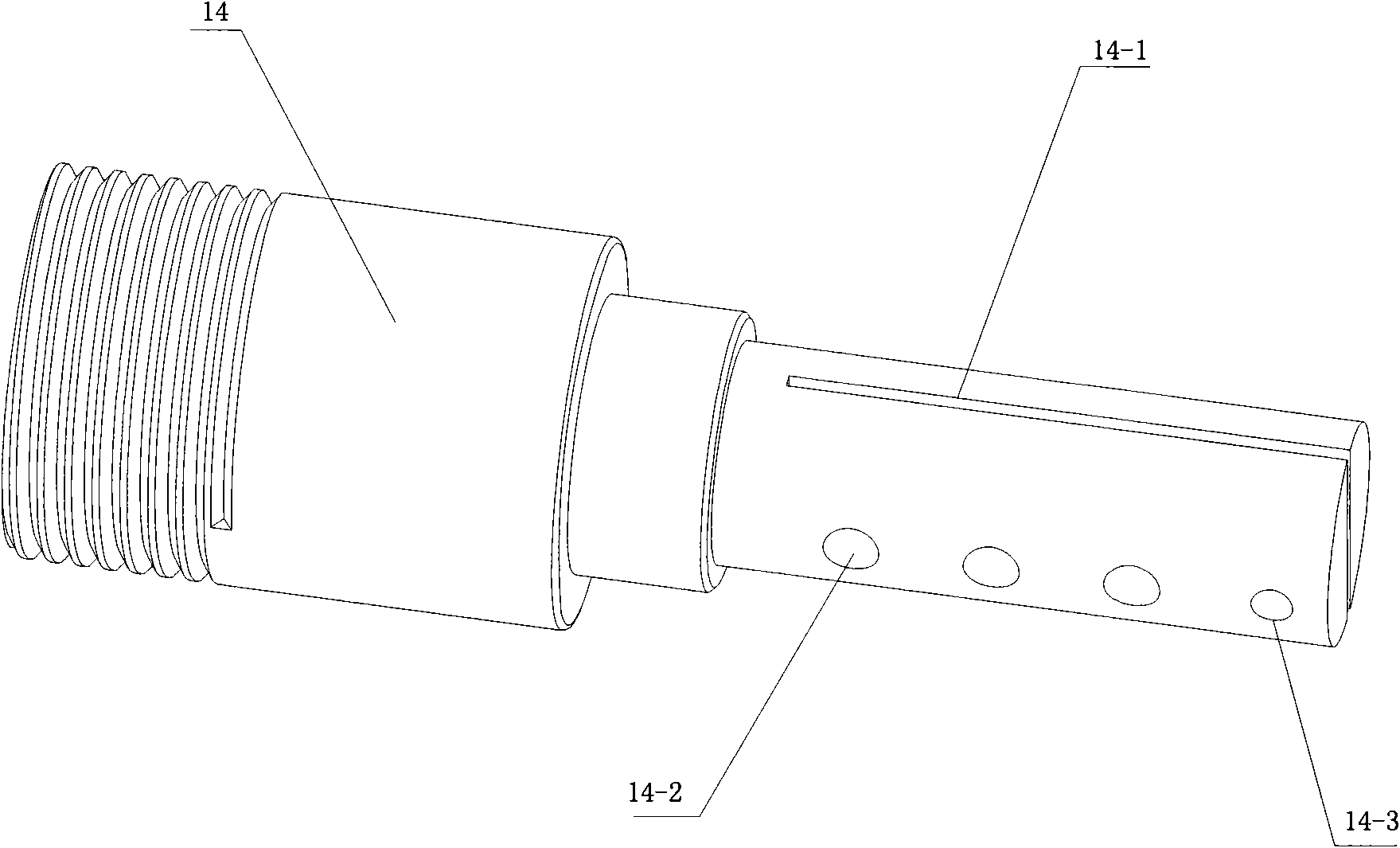
[0053] The present invention is a reconfigurable cable parallel robot and its driving module. The driving module is firstly described, and the driving module is generally divided into a winding device, a tensioning device and a transmission device. Such as figure 1 As shown in the assembly diagram of the drive module, the DC motor 2 with the reducer 3 and the encoder 1 at both ends is connected to the drive module box 4, and the drive module box 4 (such as Figure 3c Shown) is a cube box structure, and its four walls are processed with holes or grooves connected with other modules, which are the racks of various devices, such as the threaded holes of the finale supporting slide block installation groove 4-1 and the spring reel 14 4-2, linear guide rail installation groove 4-3, outer spherical guide hole installation groove 4-4, motor installation hole 4-5, in additi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More