

Distributed multi-sensor mobile robot system
A mobile robot and multi-sensor technology, applied in the field of robotics, can solve the problems of limited signal processing and computing capabilities of the single-chip system, difficulty in improving the response speed of the robot, and inability to process sensor signals, etc., to achieve high-speed data processing capabilities and real-time data communication capabilities, Improve scalability and expand the effect of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Various details involved in the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be pointed out that the described embodiments are only intended to facilitate the understanding of the present invention, rather than limiting it in any way.
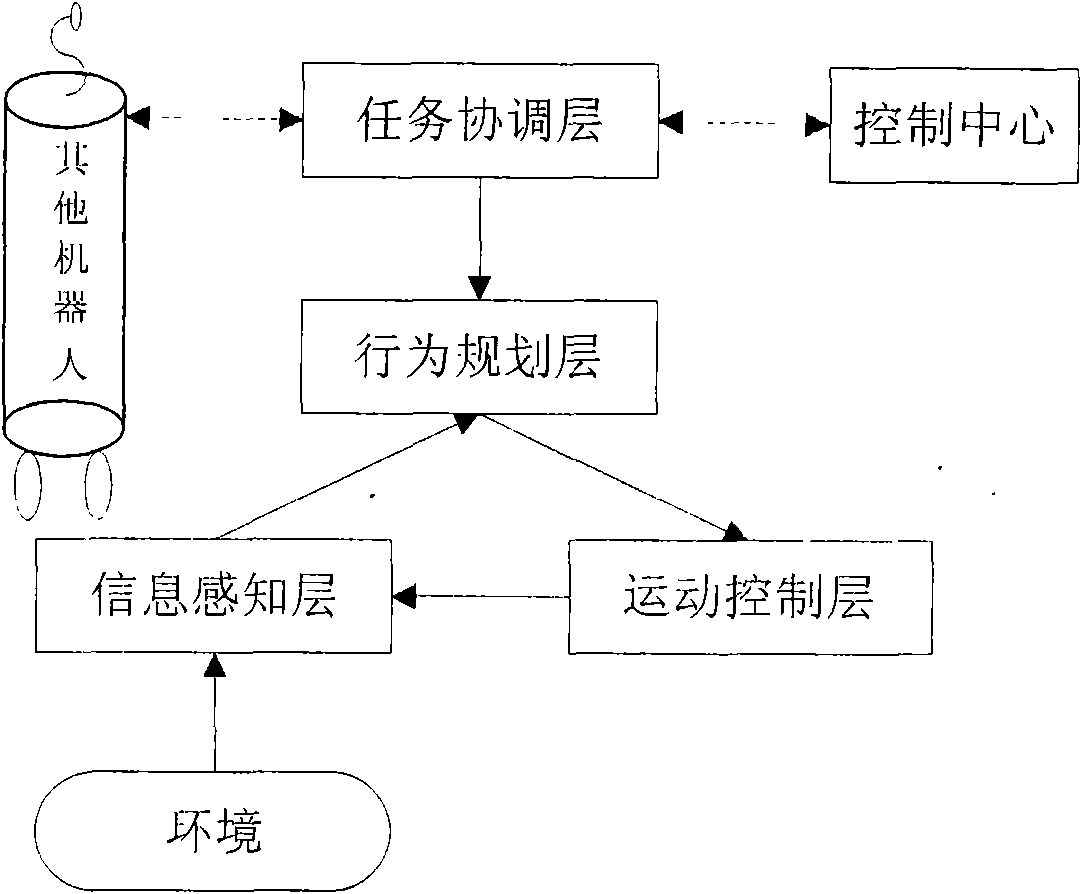
[0015] see figure 1 The architecture diagram of the mobile robot of the present invention, in the figure, the multi-sensor mobile robot system based on the distributed structure adopts a layered architecture, and the robot control system is divided into four layers: task coordination layer, behavior planning layer, information perception layer and motion control layer.
[0016] The task coordination layer and the behavior planning layer constitute the upper-level control. Through the analysis and reasoning of the environmental information perceived by the sensor and the global information of the robot's operating status, the task scheduling and fau...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More