

Inspection robot wheel-claw compound mechanism
An inspection robot and wheel claw technology, applied in the field of robotics, can solve the problems of difficulty in robot offline, poor safety protection, complex walking structure, etc., and achieve the effects of light weight, high clamping efficiency and compact system structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solution of the present invention will be described in further detail below through the embodiments and accompanying drawings.
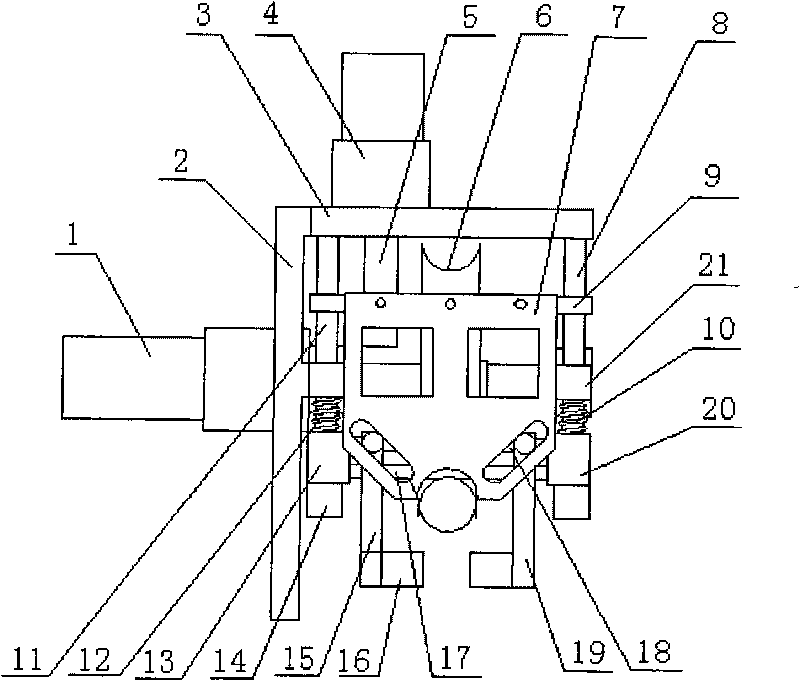
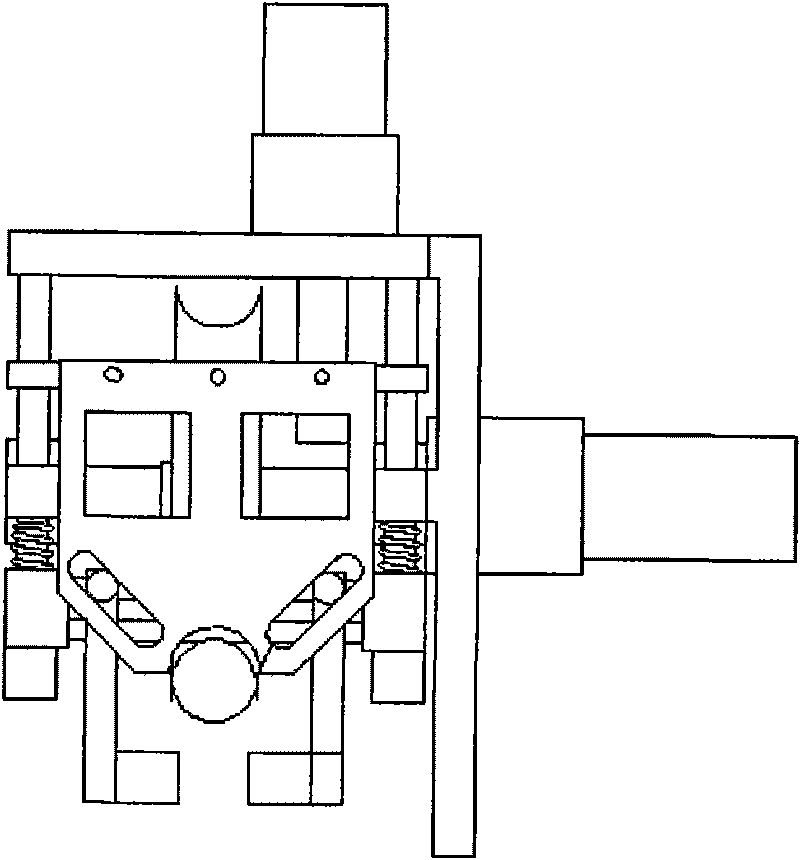
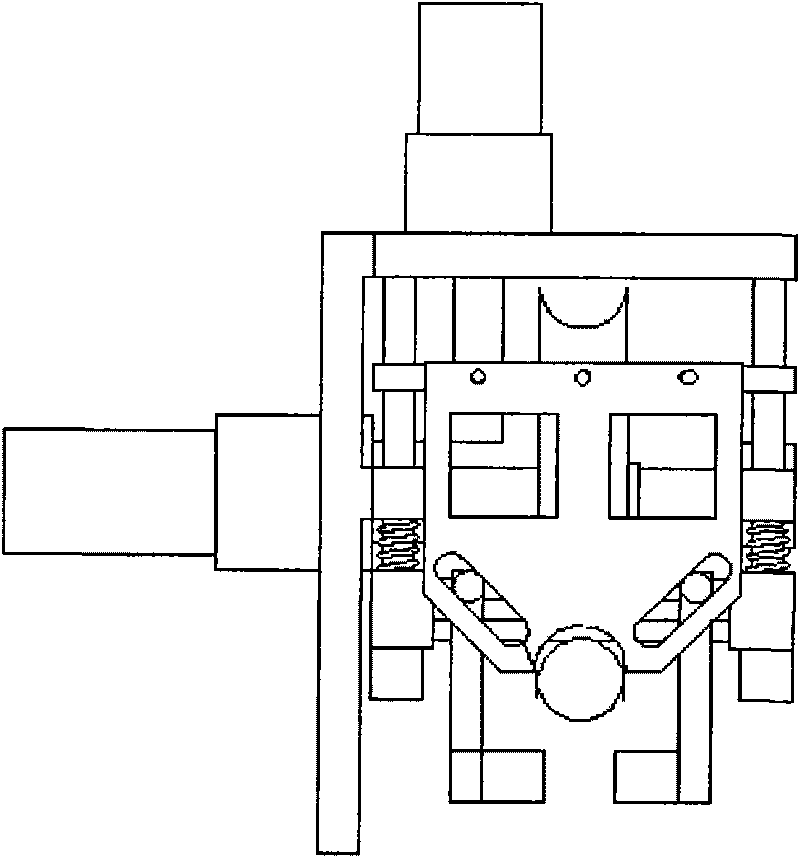
[0024] figure 1 It is a structural schematic diagram of the wheel claw compound mechanism of the inspection robot of the present invention; figure 2 is the back view of the figure; image 3 It is a schematic diagram of the released state of the embodiment of the present invention; Figure 4 It is a schematic diagram of the closed state of the embodiment of the present invention; Figure 5 It is a schematic diagram of the clamping state of the embodiment of the present invention; Figure 6 It is the left view of the wheel and claw compound mechanism of the inspection robot of the present invention.
[0025] The illustration is introduced with the structure of four vertical polished rods and two horizontally moving lead screws at the front and rear respectively, but the present invention is not limited thereto, and equivalent ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Slope | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More