

Nonlinear self-adaption control method of near-space hypersonic vehicle
An adaptive control and hypersonic technology, applied in the field of flight control, can solve the problems of many weight parameters, time-consuming calculation, poor approximation effect, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
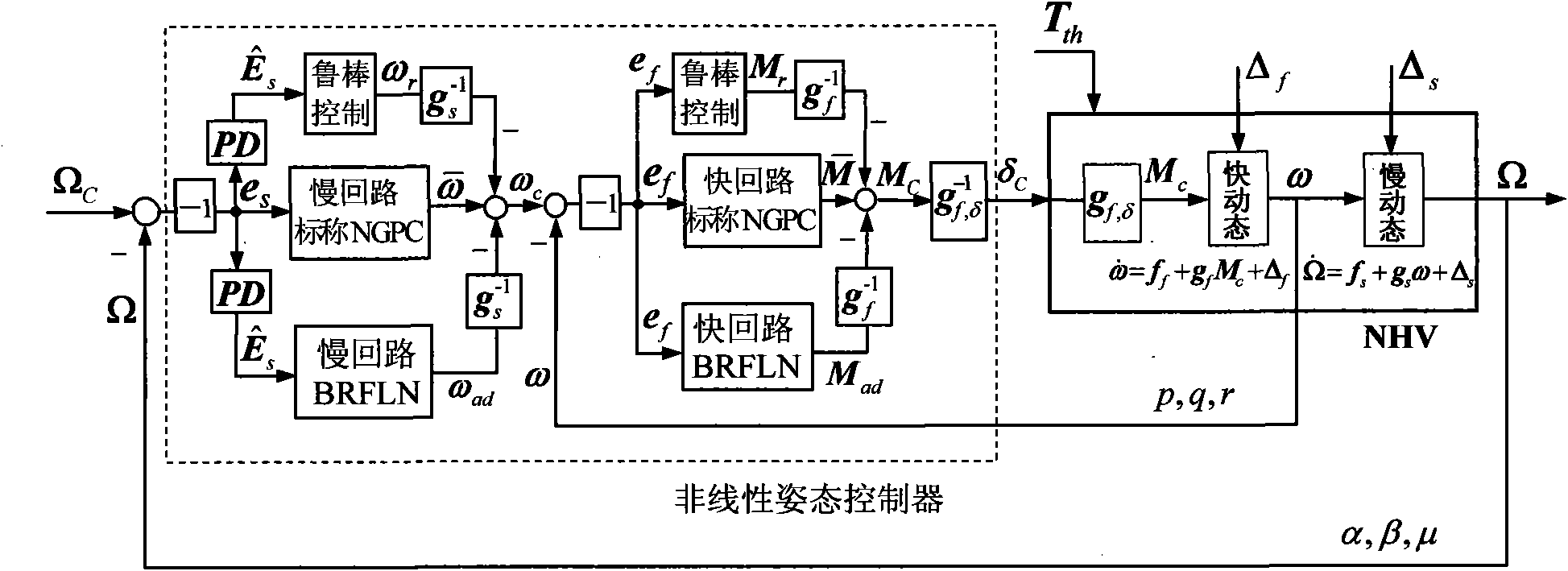
[0082] 1) The established NHV six-degree-of-freedom twelve-state equation (Zhu Liang, Uncertain Nonlinear Robust Adaptive Control of Aerospace Vehicles, Doctoral Thesis of Nanjing University of Aeronautics and Astronautics, 2006) is used as the controlled object model, and the equation The three airflow attitude angle (attack angle α, side slip angle β, track roll angle μ) equations and three angular velocity (p, q, r) equations around the body axis are written in the form of affine nonlinear equations, extracting It is used as the controlled variable equation for designing nonlinear predictive control law. The six variable equations are divided into two subsystems—an angular rate fast loop and an attitude angle slow loop, the expressions are as follows:
[0083] ω · = f f ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More