

Two-dimensional image force touch reproducing control method and system based on three-dimensional force sensor
A technology of two-dimensional image and control method, which is applied to the input/output process of instruments, graphic reading, and data processing, etc., which can solve the problems of small degree of freedom and small operating space of force feedback equipment, and achieve high precision, stable operation, easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0053] A three-dimensional force sensor-based method for controlling tactile reproduction of stone texture images, the main steps of the method are as follows:
[0054] Step 1 initializes the virtual scene;
[0055] Step 2. The operator controls the virtual hand to approach the stone texture image by manipulating the handle at the end of the force-tactile interaction device. Before the virtual hand collides with the texture image, that is, during the process of approaching the texture image, the contact force signal f between the virtual hand and the image is 0 ; If a collision occurs, calculate the contact force signal f between the virtual hand and the image at the collision point according to the contact force model established in the virtual hand and image contact force calculation module,
[0056] The contact force model is established by Gauss filtering the collected stone texture image, using the high-frequency spectrum reflecting texture information as a height map, an...
specific Embodiment 2
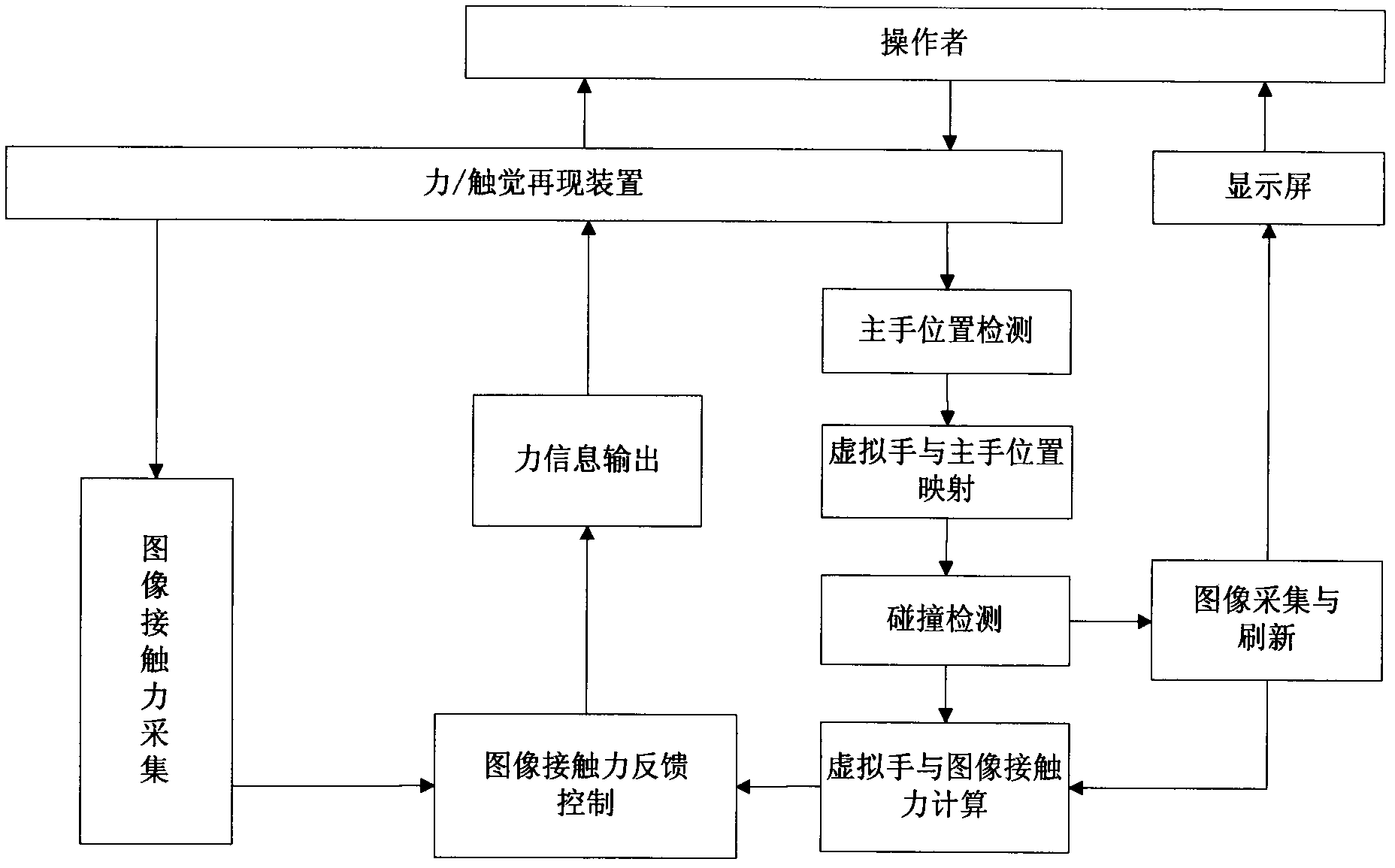
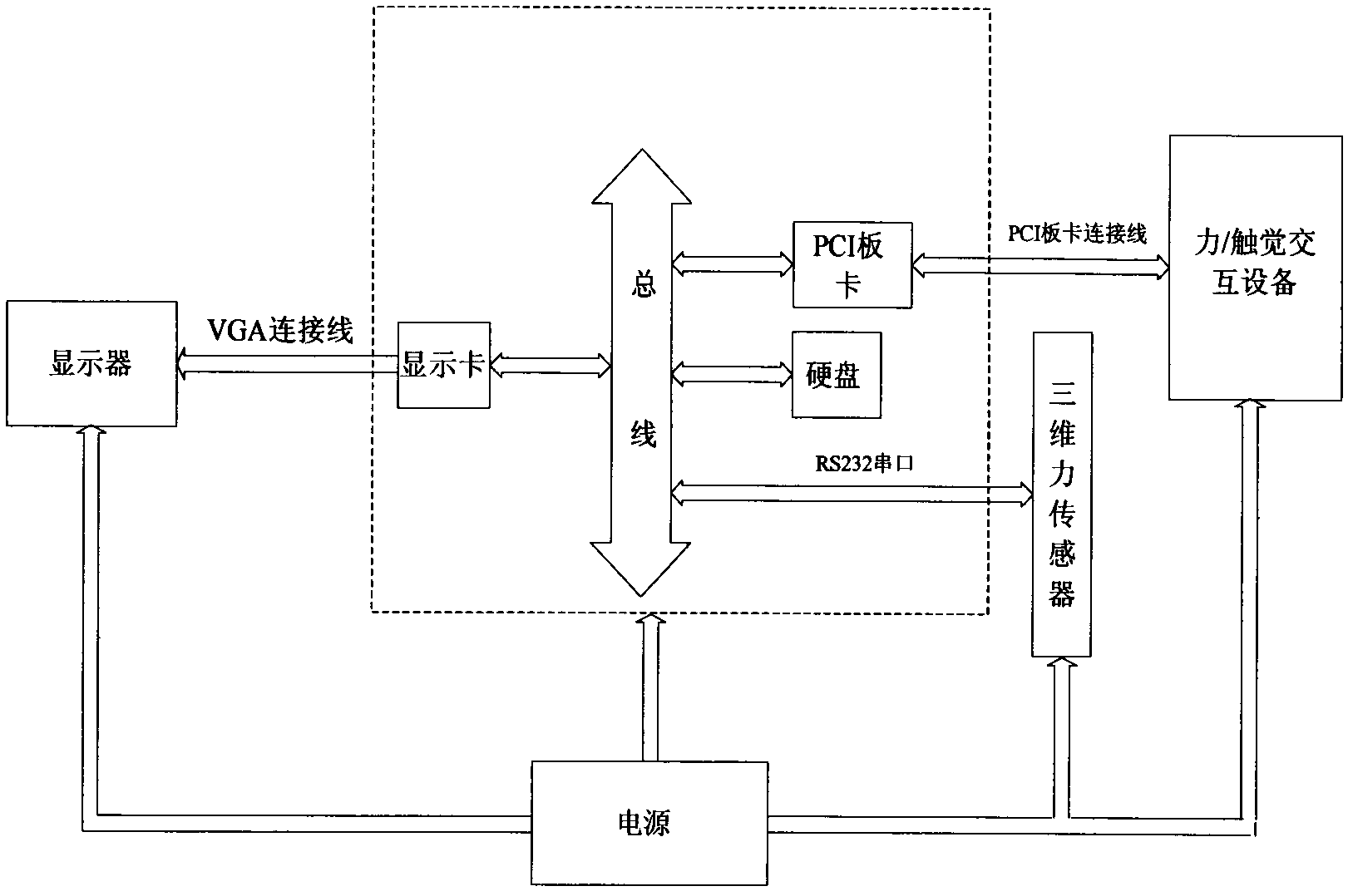
[0071] The system of the three-dimensional force sensor-based tactile reproduction control method of stone texture image force is an open closed-loop control system based on PC. This system makes full use of the rich software resources of Windows and various communication interfaces of PC. It has strong portability. Modular design and other features, such as figure 1 It is a block diagram of the overall structure of the control system of the present invention,
[0072] The control system of the force-tactile reproduction method for stone texture images based on three-dimensional force sensors, including: force-tactile interaction equipment, main hand position detection module, virtual hand and main hand position mapping module, collision for judging whether the virtual hand touches the two-dimensional image Detection module, virtual hand and image contact force calculation module, force information output module and image acquisition and display module,
[0073] In this exam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More