

Multi-joint series wheeled mobile robot
A mobile robot, multi-joint technology, applied in the field of mobile robots, can solve the problems of high cost, poor relative position, small relative gravity moment, etc., and achieve the effects of strong rollover resistance, stable operation and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] A multi-joint series wheeled mobile robot of the present invention will be further described below in conjunction with the accompanying drawings.
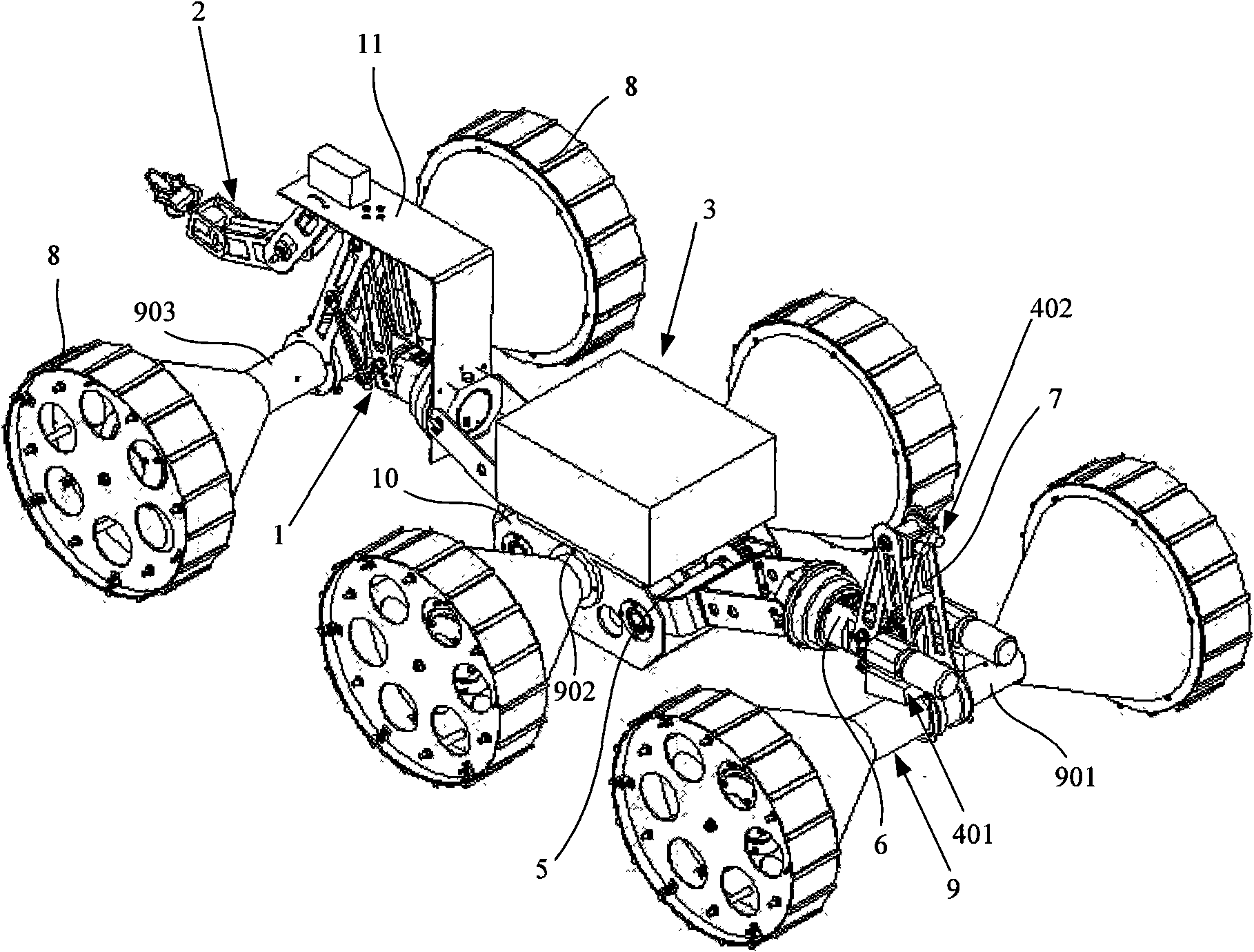
[0044] The present invention is a multi-joint series wheeled mobile robot, such as figure 1 , Figure 9 As shown, it includes a mechanical main body 1 , a mechanical arm 2 , a control system 3 and a navigation system 4 . The mechanical main body 1 includes two pitch joints 5 , two torsion joints 6 , two swing joints 7 , six wheels 8 , and an axle 9 . The navigation system 4 includes a visual navigation system 401 and an ultrasonic sensor 402 , and the axle 9 includes a front axle 901 , a middle axle 902 and a rear axle 903 .
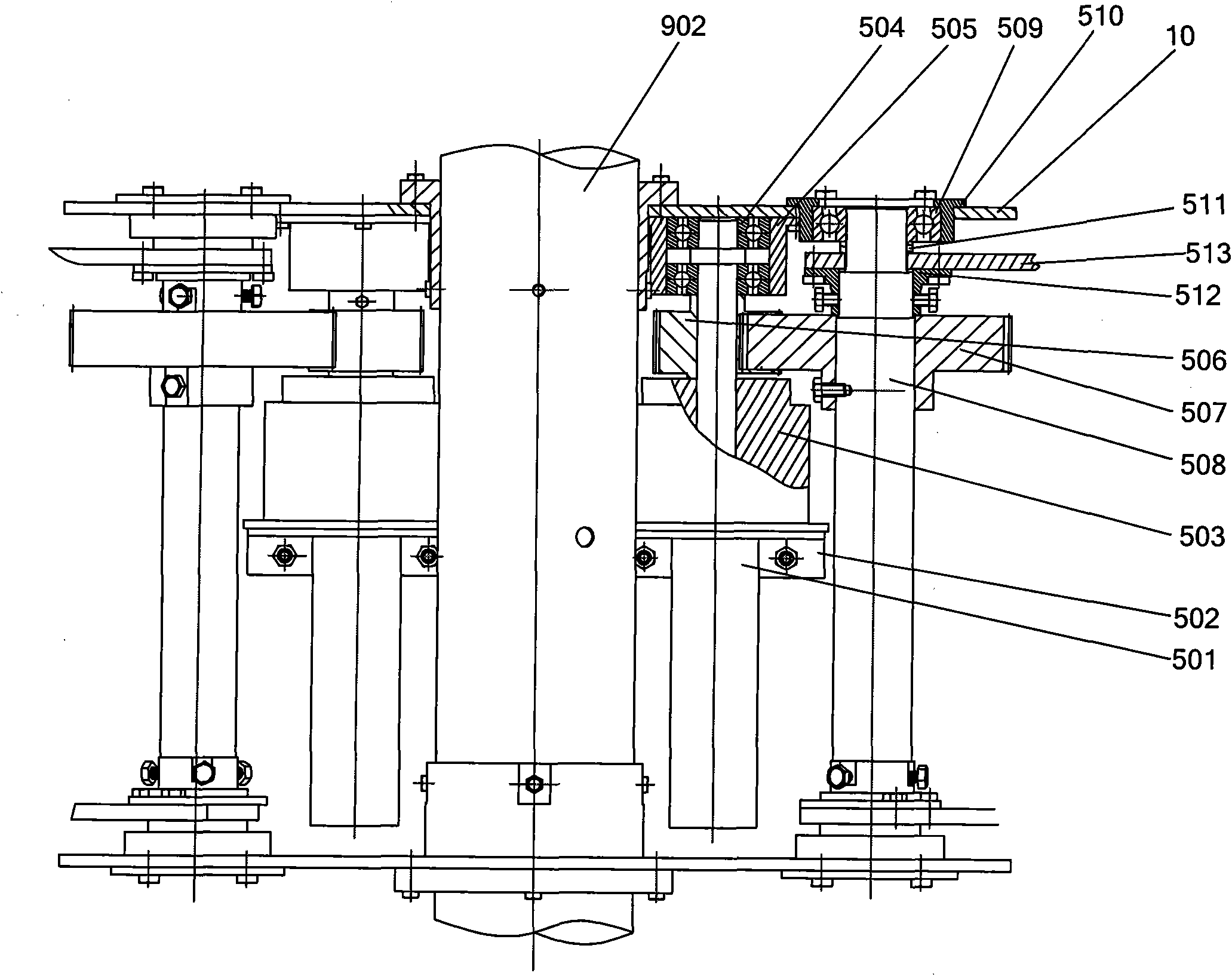
[0045] Among them, the middle axle 902 is movably socketed with the middle box 10, and the control system 3 is installed above the middle box 10; two pitch joints 5 are fixed inside the middle box 10, and are symmetrical about the middle axle 902, and the pitch joints 5 is located below the axis of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More