

Method for automatically adjusting speed loop control parameters of alternating-current servo system based on inertia identification
A technology of parameter self-tuning and system speed, applied in vector control system, single motor speed/torque control, control system, etc., can solve problems such as poor performance of closed-loop system and system instability, and achieve good adaptability and design simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033]The accompanying drawing discloses a non-restrictive structural schematic diagram of a preferred embodiment involved in the present invention, and the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. In addition, this embodiment is implemented on the premise of the technical solution of the invention, and detailed implementation methods and specific implementation processes are given, but the protection scope of the present invention is not limited to the following embodiments.
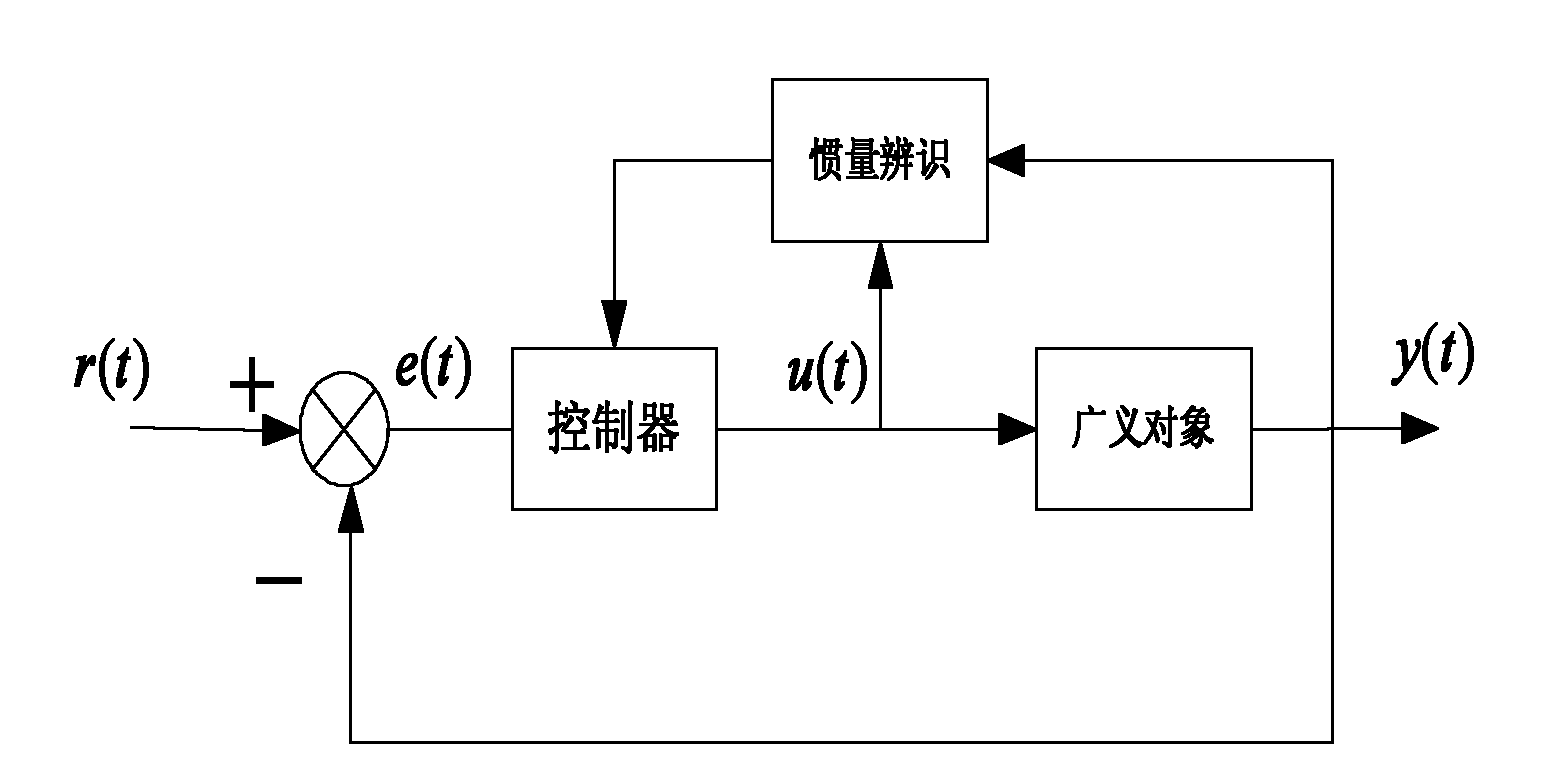
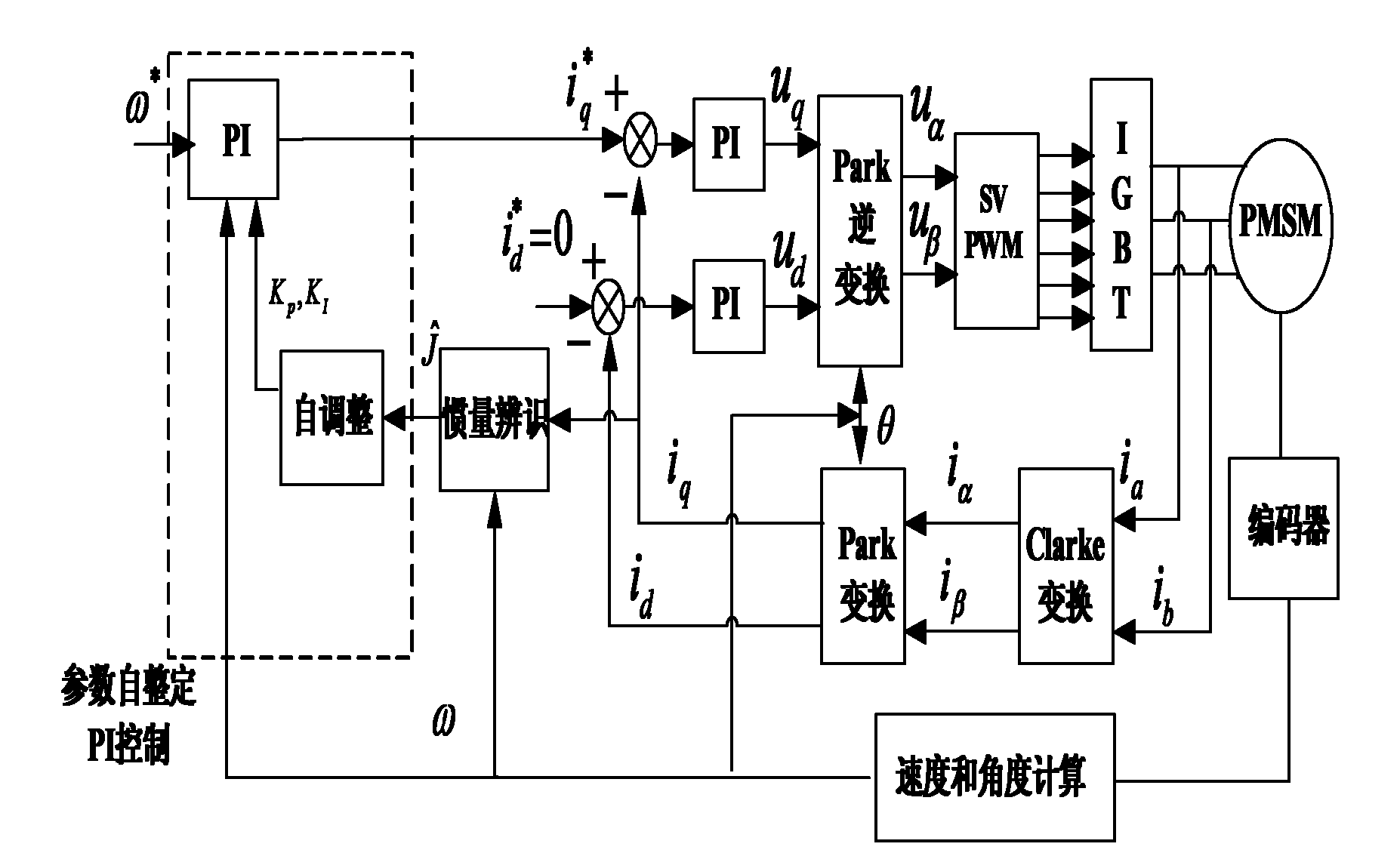
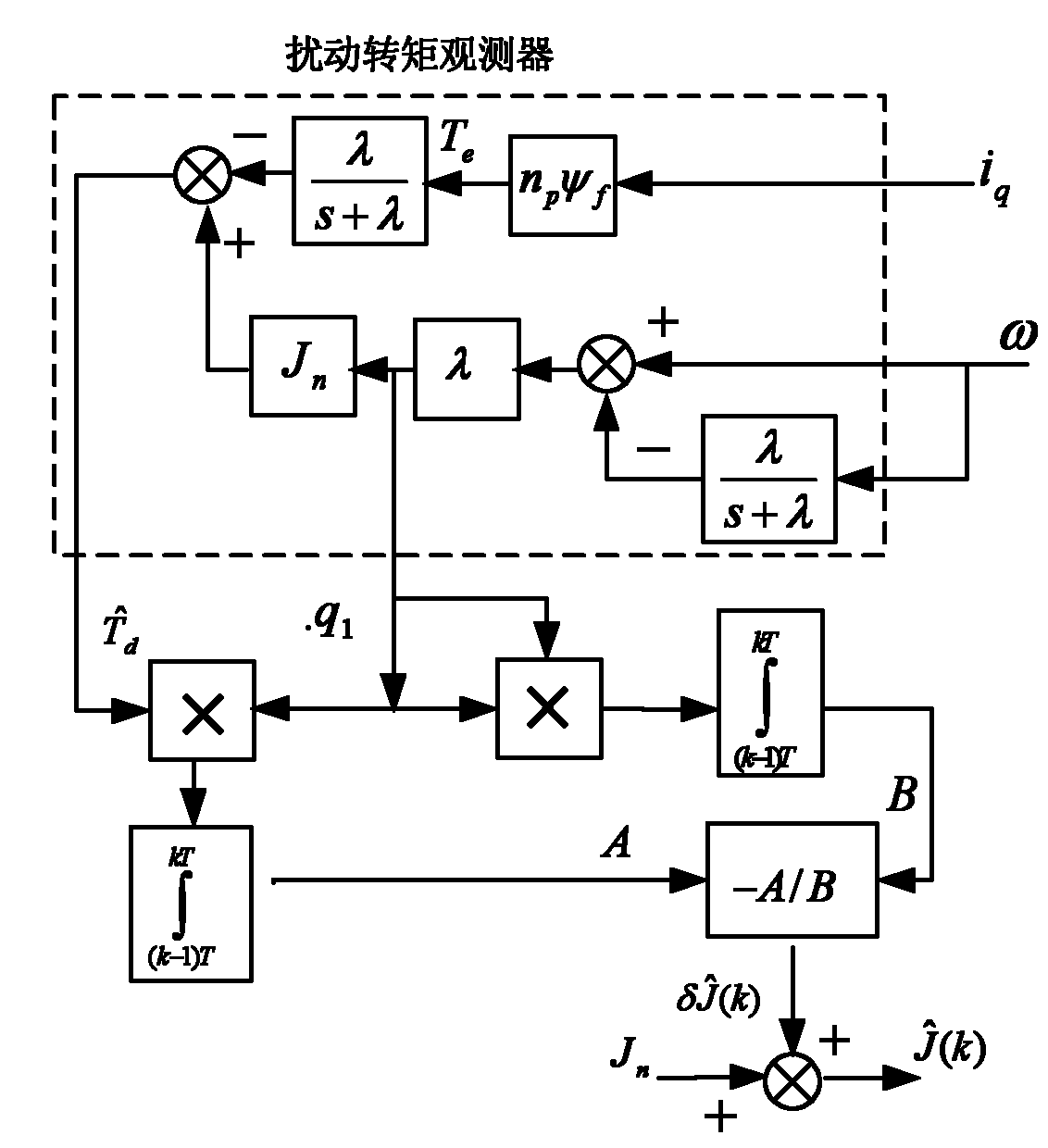
[0034] The self-tuning method of the control parameters of the AC servo system based on inertia identification in the present invention first takes the current loop and the servo motor as generalized objects, and obtains the estimated value of the moment of inertia of the servo motor and its load through inertia identification; then adopts the pole configuration method, PID controller parameters for speed loop and Per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More