

Particle filter and RBF identification-based neural network PID control parameter self-setting method
A neural network and particle filter technology, applied in the field of control systems, can solve problems such as inaccurate calculations, and achieve the effect of improving dynamic response performance and anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
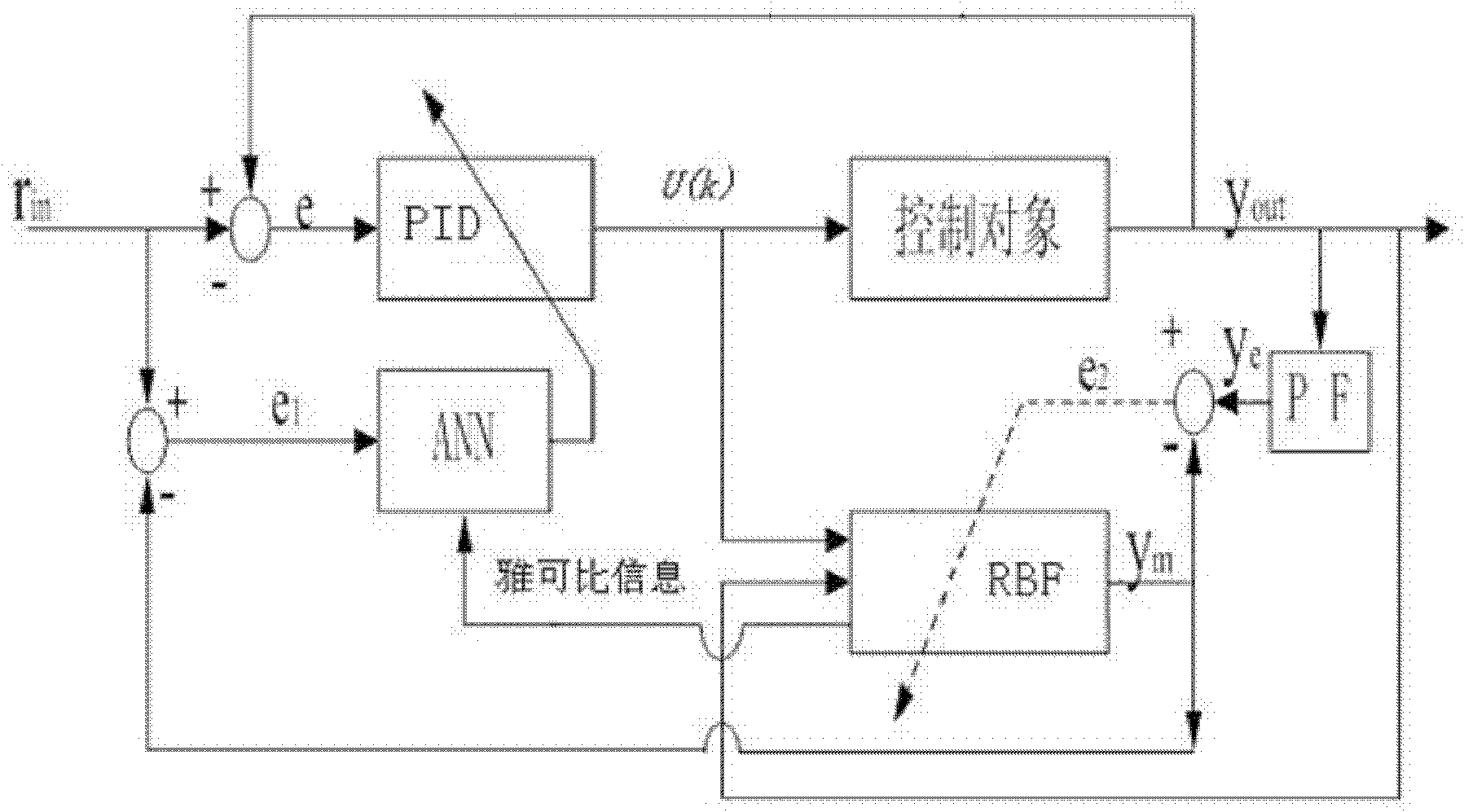
[0012] see figure 1 , first create the figure 1 The structure of the control system shown, the establishment method of this structure is: the original control system is to connect the output of the PID controller in the system to the input of the control object, and the present invention adds RBF neural network identification on the basis of the original neuron PID controller Structure and particle filter section. Connect the output of the neuron PID controller and the output of the system to the input of the RBF neural network identification structure, and the particle filter part is connected between the output of the system and the identification structure of the RBF neural network. The input signal of the RBF neural network is the output of the PID controller. The control signal u(k) and the output y of the system out . The output y of the system is analyzed by particle filter out Perform filtering to obtain the filtered output result y e ;The output result of the par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More