

Strapdown inertial navigation device based on micro mechanical gyroscopes
A strapdown inertial navigation and micro-mechanical gyroscope technology, applied in the field of strapdown inertial navigation systems, can solve the problems of not meeting the needs of miniaturization, high price, and large volume of mechanical gyroscopes, so as to ensure simplicity, stability, and measurement Effects of precision and design, volume and mass reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
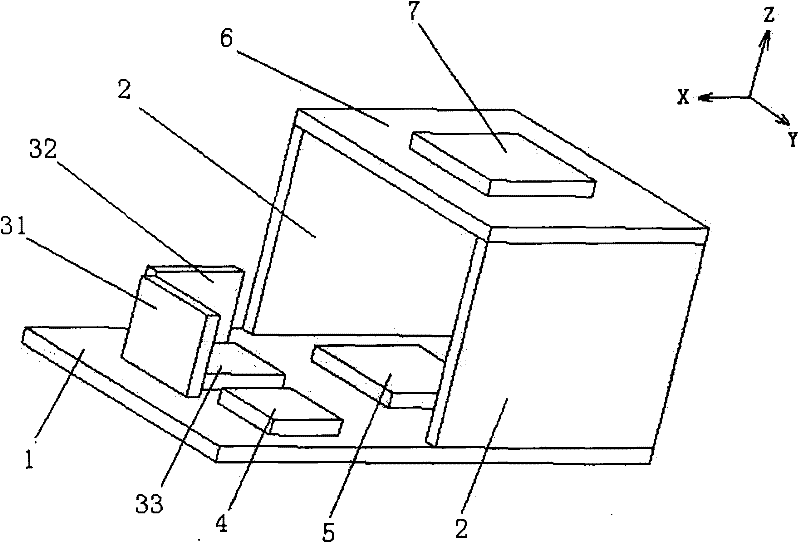
[0017] Such as figure 1 As shown, the present invention is a small-volume strapdown inertial navigation device based on a micro-mechanical gyroscope and a three-axis semiconductor micro-accelerometer. The specific embodiments of the present invention are described below in conjunction with the accompanying drawings.
[0018] see figure 1 As shown, the present invention consists of a signal acquisition circuit 1, a link pin header 2, an X-axis micro-mechanical gyroscope 31, a Y-axis micro-mechanical gyroscope 32, a Z-axis micro-mechanical gyroscope 33, a three-axis semiconductor micro-accelerometer 4, a signal acquisition chip 5, The data processing circuit 6 and the data processing chip 7 are composed. The signal acquisition circuit 1 and the data processing circuit 6 are stacked and fixedly connected through pin headers, forming the basic mechanical skeleton of the strapdown inertial navigation system. The X-axis micromechanical gyroscope 31 is fixed on the signal acquisit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More