

UUV (unmanned underwater vehicle) aided navigation method based on current profile
An auxiliary navigation and ocean current technology, applied in the field of UUV navigation, can solve the problems of difficulty in promotion, increase the complexity of the UUV system, and cannot guarantee the navigation accuracy, and achieve the effect of improving environmental adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings.
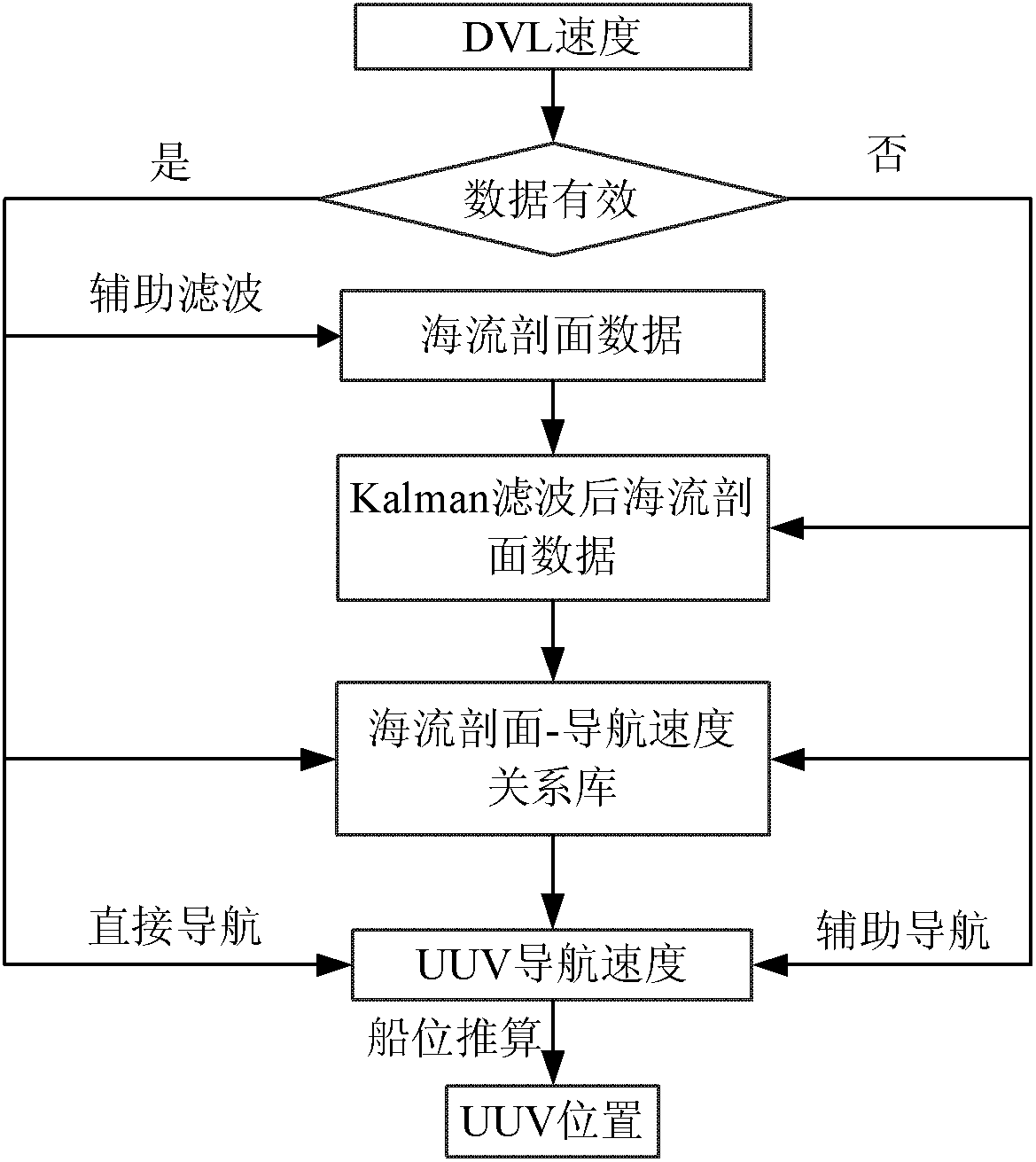
[0038] (1) Ocean current profile data and DVL velocity acquisition
[0039] When the UUV is sailing at a certain depth underwater, the ADCP (installed with the transducer head downward) emits sound waves of a certain frequency under the control of the control computer, and uses the Doppler effect to obtain the ocean current profile close to the thickness of the UUV water layer. The data is transmitted to the storage medium of the control computer through the serial port (or network port) for storage, so that the ocean current profile data can be obtained through ADCP.
[0040] Use the control computer carried by the UUV to control the DVL to emit sound waves of a certain frequency, and use the Doppler effect to obtain the speed of the DVL. The speed information of the DVL is transmitted to the storage medium of the control computer through the serial port or ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More