

Universal rolling spherical robot
A spherical robot and spherical shell technology, which is applied in the field of spherical robots and universal rolling spherical robots, can solve the problems of robot loss of movement ability, high manufacturing difficulty and high cost, and achieves enhanced robot movement ability, reasonable internal space setting, and easy center of gravity. The effect of adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
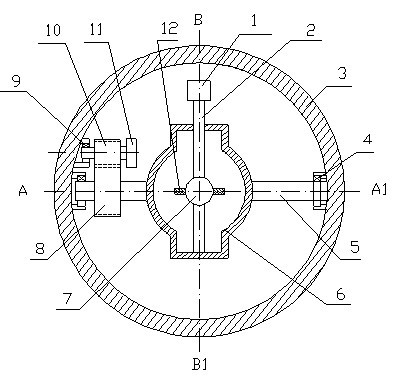
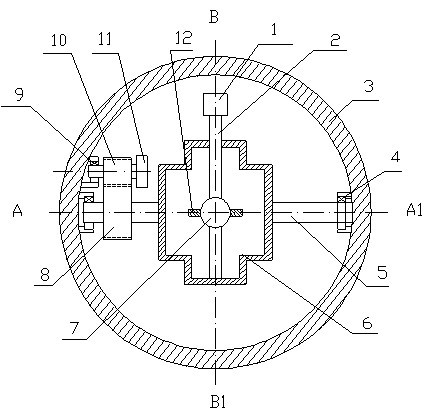
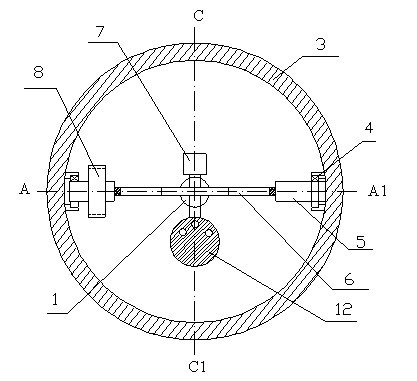
[0027] Such as figure 1 , figure 2 , image 3 As shown, the universal rolling spherical robot of the present invention includes a spherical shell 3 and a walking drive device inside thereof. Wherein, the walking driving device includes an inner frame 6 at the center of the center of the sphere, the two ends of the outer sides of the inner frame 6 are fixed on the major axis 5, the symmetry line of the inner frame 6 coincides with the axis of the major axis 5, and the major axis 5 passes through the center of the sphere and passes through the major axis 5. The bearing 4 and the spherical shell 3 form a rotating pair; the long shaft driven gear 8 is sleeved on the long shaft 5, the long shaft motor 11 is connected with the long shaft driving gear 10 and the long shaft supporting bearing 4 is used as the rotation support, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More