

Industrial robot kinematics parameter rapid low-cost calibration device and method thereof
A robot kinematics, industrial robot technology, applied in the direction of digital control, electrical program control, etc., can solve the problems of low positioning accuracy, complicated installation and operation, expensive calibration equipment, etc., and achieve the effect of low cost, small size and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
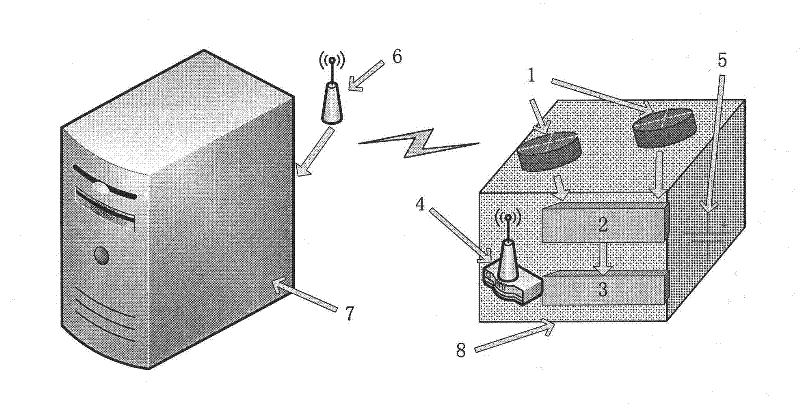
[0032] Using the device of the present invention to carry out calibration virtual reality simulation on the industrial robot IRB1600, two PSDs are used in the test, and the specific implementation steps are as follows:
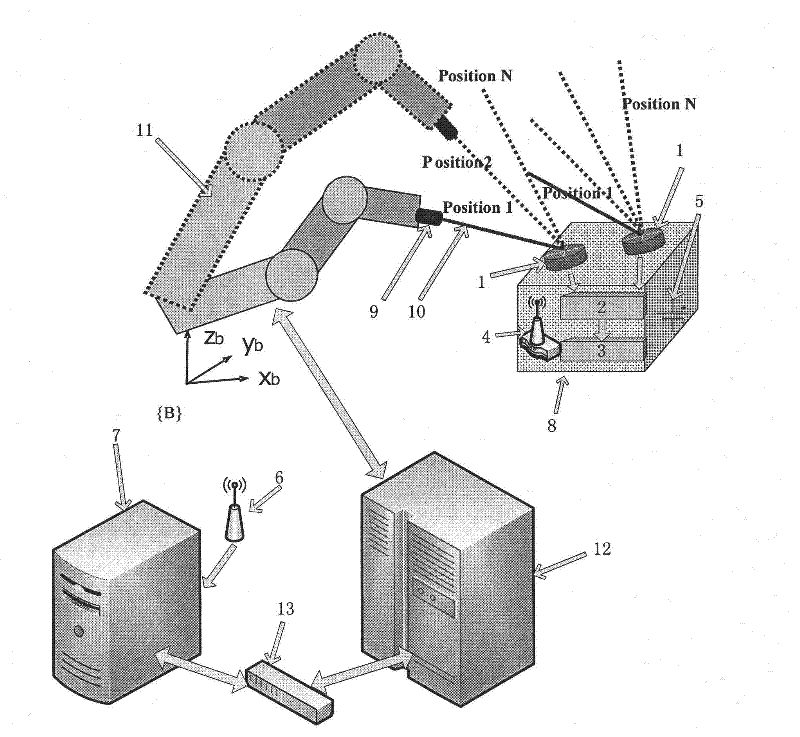
[0033] The first step is to place the laser positioning device (8) based on multiple PSDs in the reachable workspace of the industrial robot, combining figure 1 and figure 2 , Virtual reality establishes industrial robot kinematics mathematical model, robot end connection device and laser beam mathematical model, PSD mathematical model, random error model, etc., and randomly generates robot rod parameter errors;
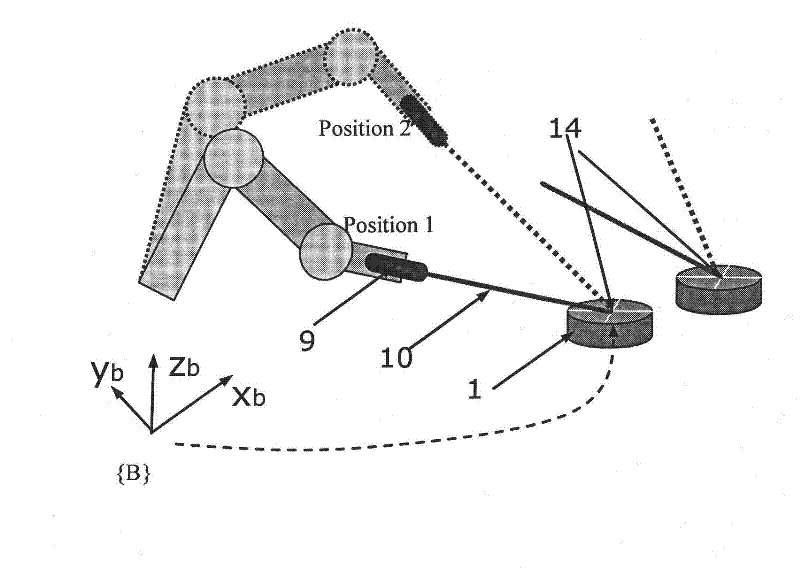
[0034] In the second step, based on the calibration device, the end of the industrial robot is equipped with a laser to automatically project the laser beam to the center point of one of the PSDs in different attitudes, increasing the random interference error based on the PSD feedback positioning and the robot joint motor code disc, and reading dif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More