

Bionic elastic spine mechanism of quadruped robots
A quadruped robot and spine technology, applied in the field of robotics, can solve the problems of lack of elastic spine, lack of a quadruped robot to run at high speed, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Preferred embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
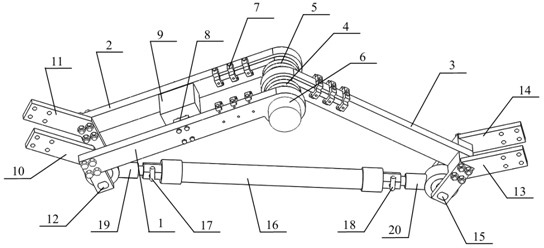
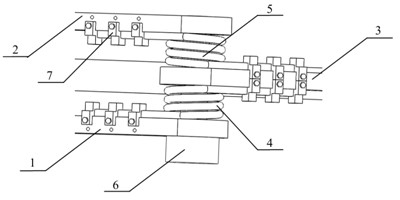
[0016] Such as figure 1 As shown, a quadruped robot bionic elastic spine mechanism includes a front spine part, a rear spine part, an elastic joint part and a pneumatic muscle part, wherein one end of the front spine part is connected with one end of the rear spine part through the elastic joint part, and the front spine part The other end of the section is connected to the other end of the posterior spine section via the Pneumatic Muscle section. The front spine part includes the left front spine block 1, the right front spine block 2, the left front leg fixing seat 10, the right front leg fixing seat 11, the tendon front coupling shaft 12, the front spine block connector 8 and the posture sensor 9; the rear spine part includes the rear spine block 3. The left rear leg fixing seat 13, the right rear leg fixing seat 14, the tendon rear couplin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More