Space vehicle control moment computing system based on proportional derivative (PD) control law
A technology for controlling torque and calculating systems, applied in attitude control and other directions, can solve problems such as slow speed and low precision, and achieve the effect of increased calculation speed, high precision and high calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
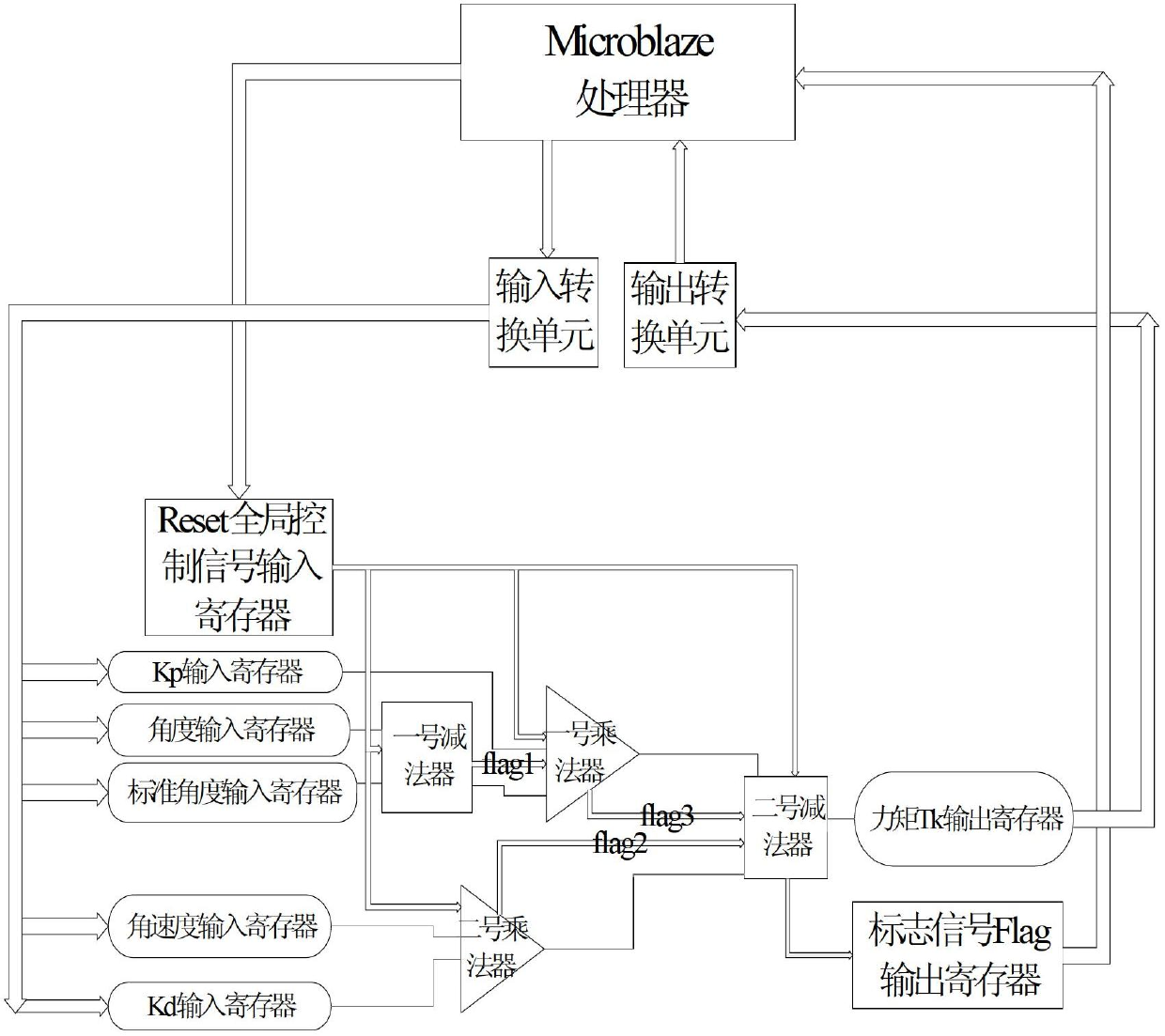
[0007] Specific implementation mode one: combine figure 1 Illustrate this embodiment, a kind of space vehicle control torque calculation system based on PD control law described in this embodiment, it comprises Microblaze processor, it also comprises Reset global control signal input register, Kp input register, Kd input register, angle input Register, standard angle input register, angular velocity input register, input conversion unit, output conversion unit, No. 1 subtractor, No. 2 subtractor, No. 1 multiplier, No. 2 multiplier, torque Tk output register and flag signal Flag output register, The control torque calculation system uses the FPGA external input clock as the calculation clock; the output end of the output data of the Microblaze processor is connected to the input end of the input conversion unit, and the output end of the input conversion unit is simultaneously connected to the input end of the Kp input register and the Kd input The input end of the register, th...
specific Embodiment approach 2
[0015] Specific implementation mode two: combination figure 1 Describe this embodiment. This embodiment is a further limitation of the PD control law-based spacecraft control torque calculation system described in Embodiment 1. The Reset global control signal stored in the Reset global control signal input register is used to solve the control torque calculation. The timing of the system, only when the Microblaze processor sets Reset to 1, the No. 1 subtractor, No. 2 subtractor, No. 1 multiplier and No. 2 multiplier in the system are allowed to calculate by the Microblaze processor, and the calculation ends , the flag signal Flag output register sends the global flag signal Flag, which is used to notify the Microblaze processor that the entire calculation process is completed, and the Microblaze processor takes away the torque Tk.
[0016] Set the control signal to solve the timing problem. The external input signal includes the global control signal Reset, which is used to gl...
specific Embodiment approach 3
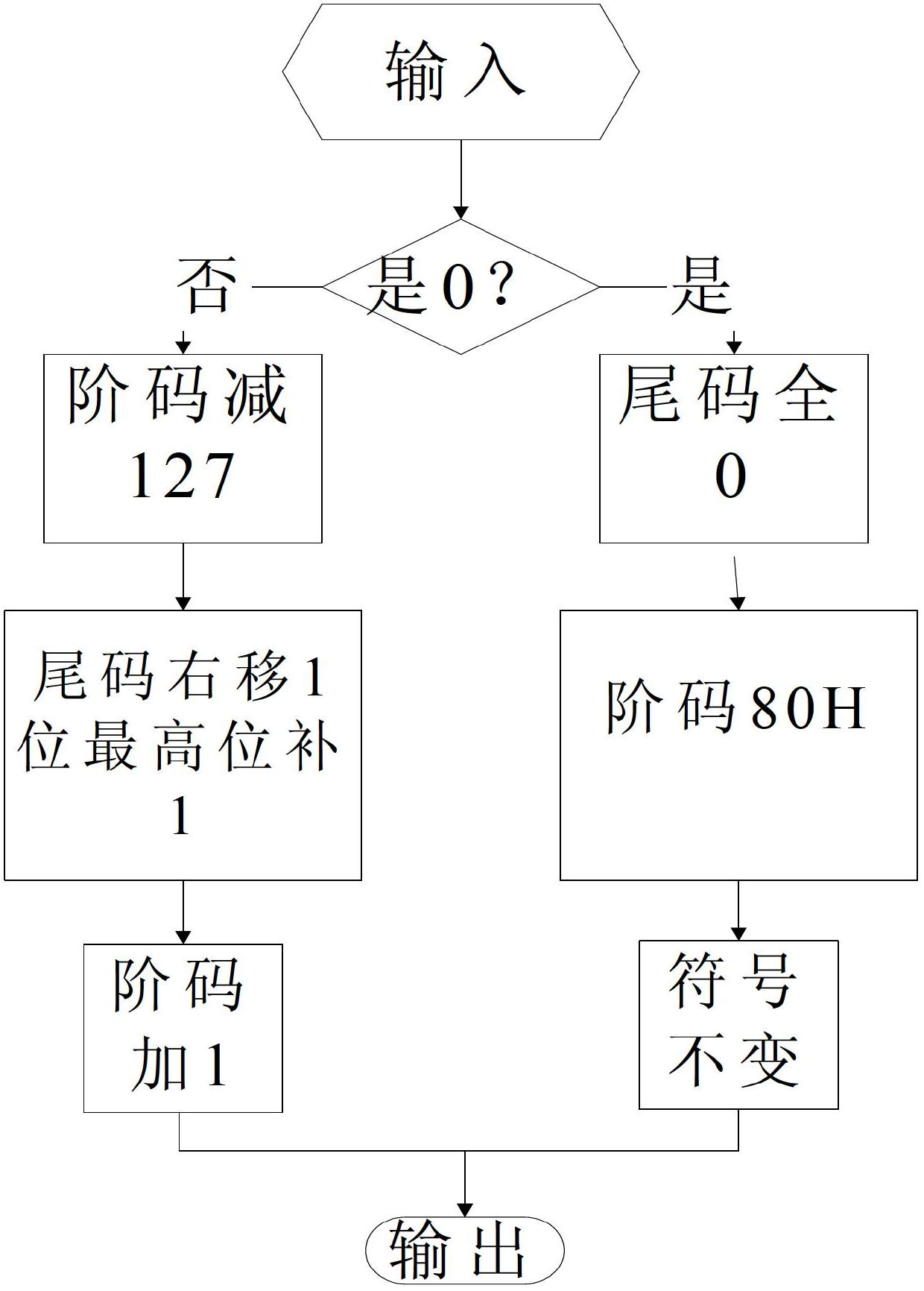
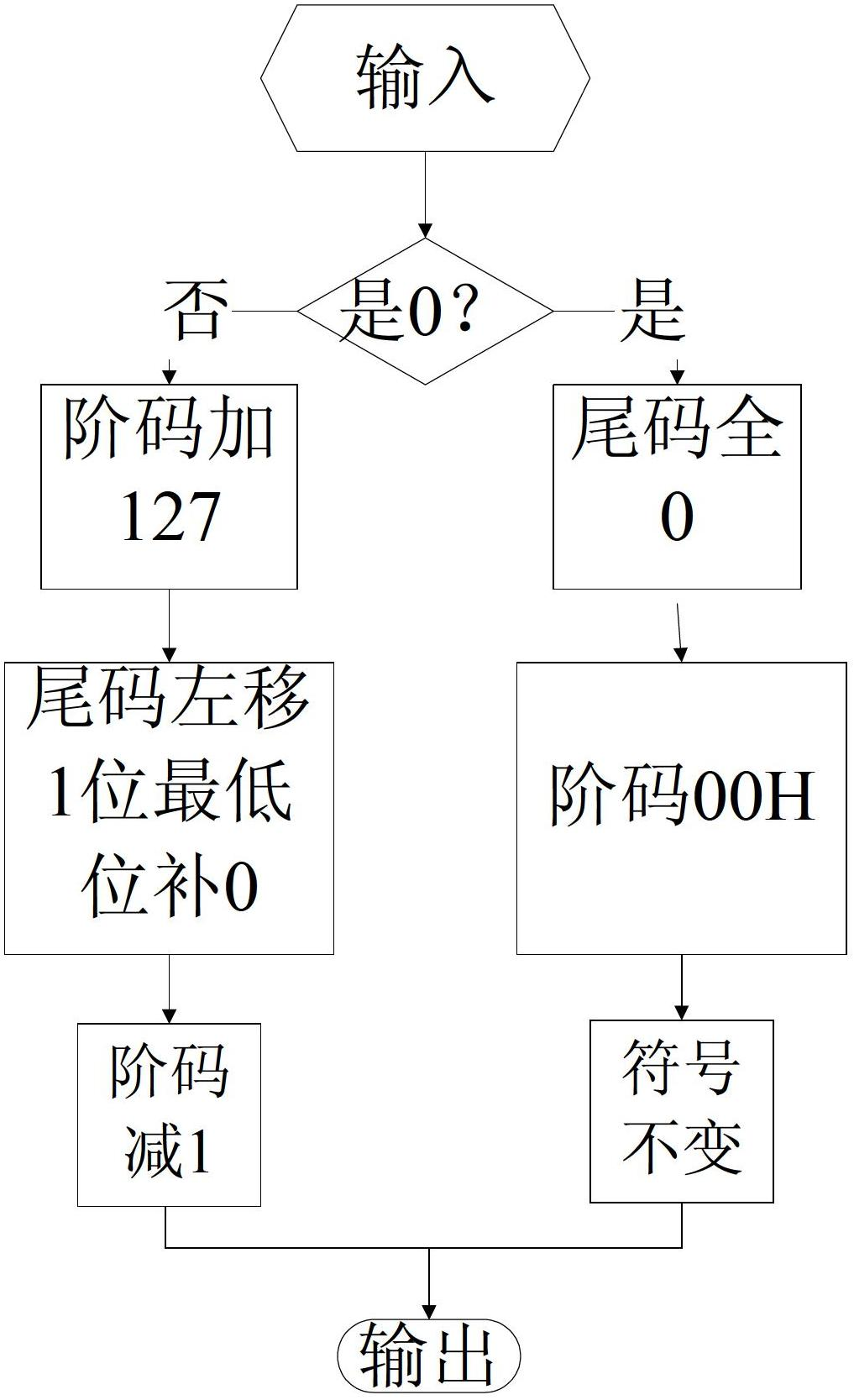
[0017] Specific Embodiment Three: This embodiment is a further limitation of the PD control law-based spacecraft control torque calculation system described in Embodiment One. The internal calculation adopts a self-defined 32-bit floating-point number data form, and the basic The format is: S E[30:23] F[22:0],
[0018] S represents the sign bit, 0 represents a positive number, and 1 represents a negative number; E[30:23] represents an order code, which is represented by a shift code and is an exponent item; F[22:0] represents a tail code, and the tail code is unsigned Binary number original code representation;
[0019] Representation of the number '0': as long as the tail code F[22:0] is all 0, it means that the size of the floating point number is '0';
[0020] The actual value it represents is: Val=(-1) S ×0.F×2 E .
[0021] The number system has a large range of representation and high calculation accuracy, and is more suitable for large-volume and heavy spacecraft attit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More