

Road information extraction device based on two-dimensional image and depth information and road crack information detection method based on same
A technology of two-dimensional images and depth information, which can be used in measurement devices, optical devices, and material analysis by optical means. , the effect of reducing the false positive rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
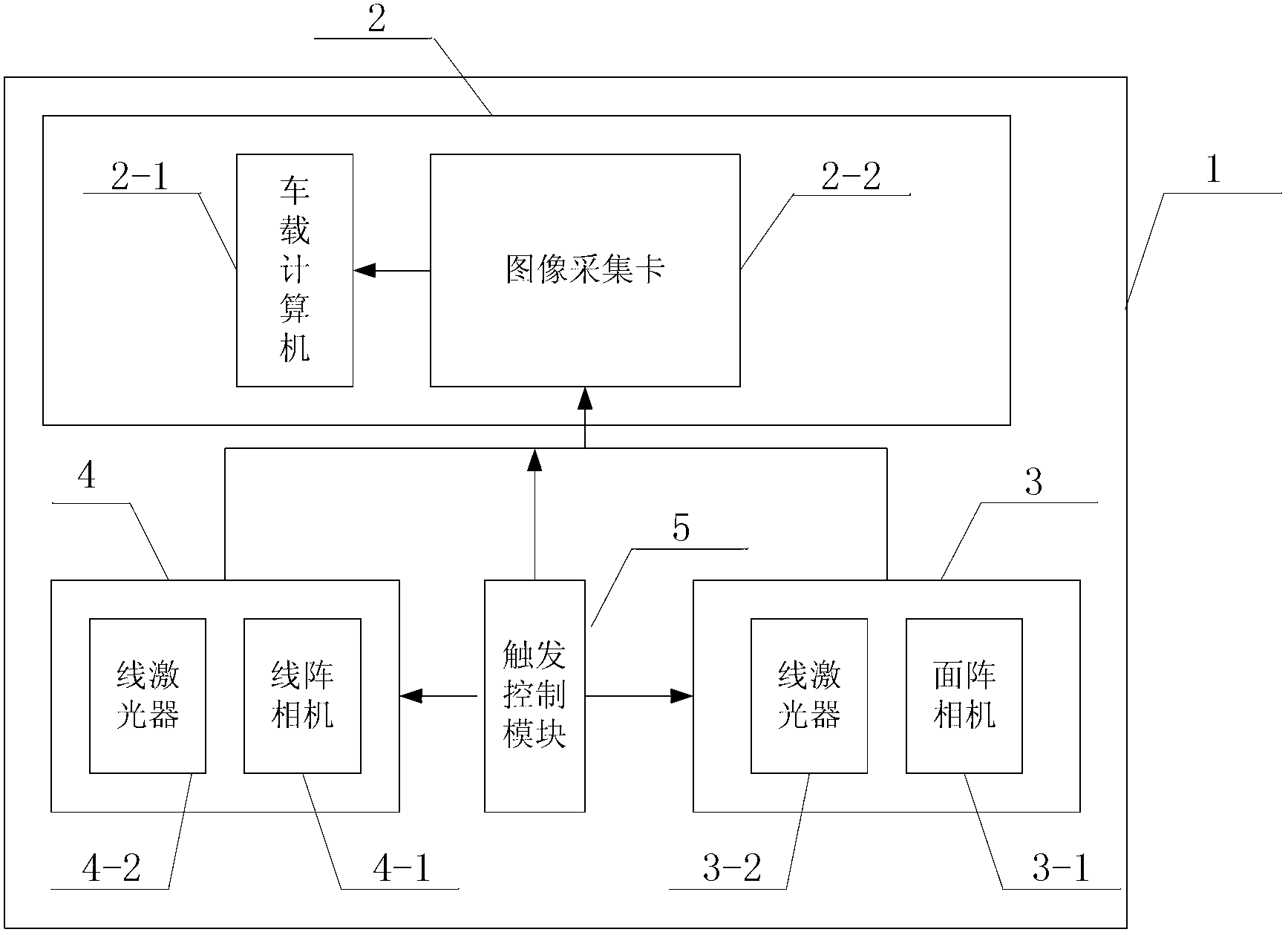
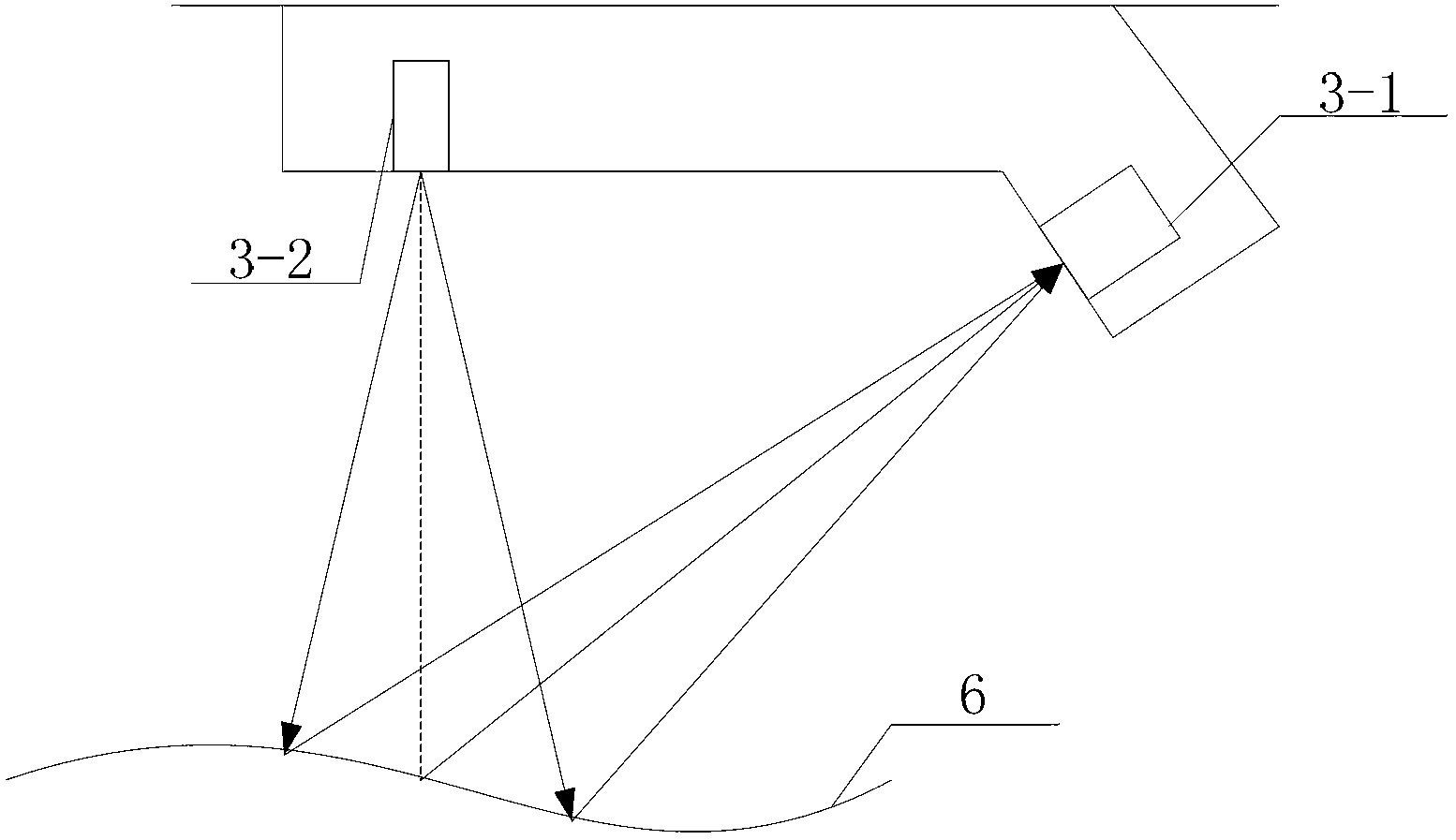
[0034] Specific implementation mode one: see figure 1 , 2and 4 describe this embodiment. The road surface information extraction device based on two-dimensional images and depth information described in this embodiment includes a road surface depth information collection component 3, a two-dimensional image collection component 4 and a trigger control module 5; the road surface depth information collection component 3 is fixed on the bottom of the car body, The road surface depth information collection component 3 is composed of a structured light laser 3-2 and an area array camera 3-1. The structured light strip emitted by the structured light laser 3-2 is projected onto the road surface, and the trigger control module 5 is used to collect the speed information of the vehicle. , and output a trigger signal to the area array camera 3-1 and the line array camera 4-1 at the same time according to the speed information, the area array camera 3-1 is used to collect the structured...
specific Embodiment approach 2
[0041] Embodiment 2: The difference between this embodiment and the road surface information extraction device based on two-dimensional images and depth information described in Embodiment 1 is that the road surface information extraction device described in this embodiment also includes an image acquisition component 2, The image collection component 2 is used to collect the information collected by the road surface depth information collection component 3 and the two-dimensional image collection component 4, and send the collected information to an external data storage or processing system through a serial port or a parallel port.
[0042] The above-mentioned image acquisition component 2 can be realized by using an image acquisition card 2 .
[0043] The above-mentioned external data storage system can be realized by using a fixed or movable data storage device or a computer system.
[0044] The above-mentioned external data processing system can be implemented by a comput...
specific Embodiment approach 3
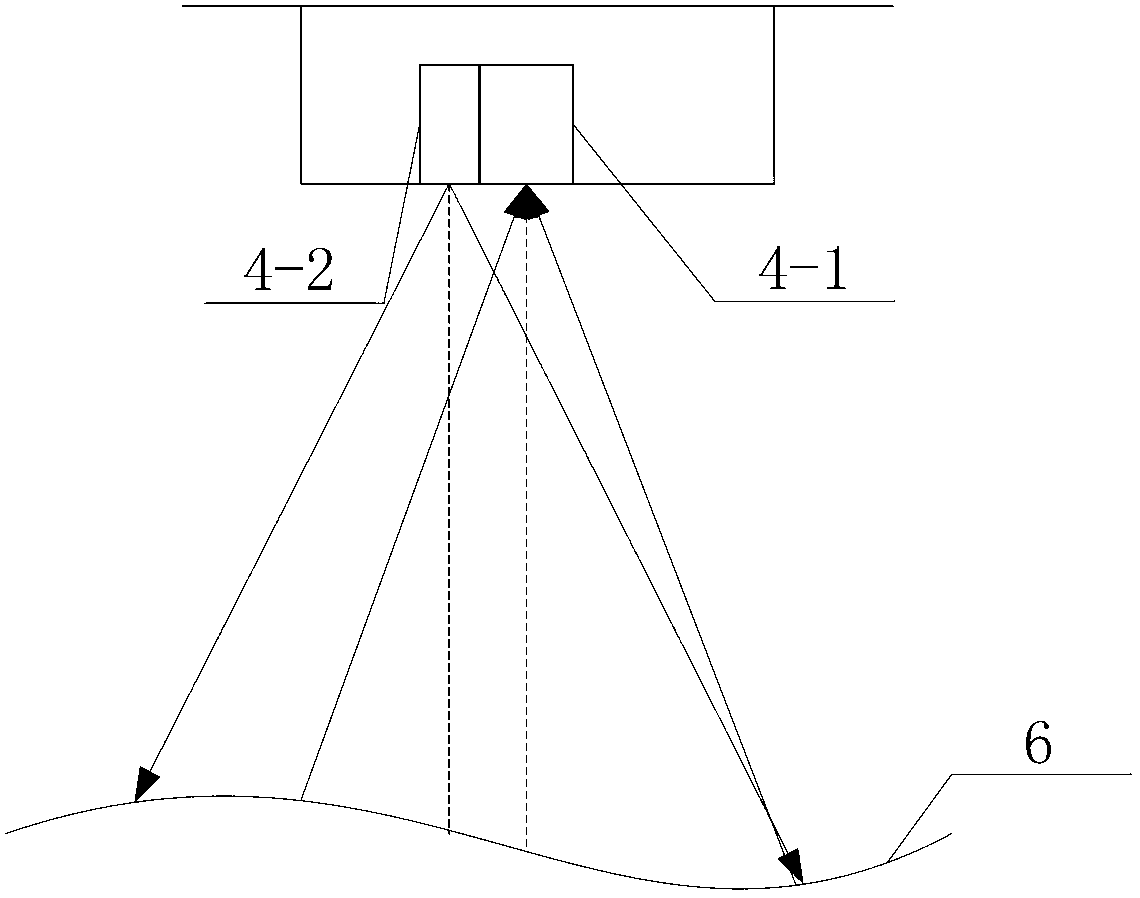
[0046] Specific implementation mode three: see image 3 Describe this embodiment. This embodiment is a further limitation of the two-dimensional image acquisition component 4 in the road surface information extraction device based on two-dimensional images and depth information described in the first specific embodiment. The two-dimensional image acquisition in this embodiment The assembly 4 also includes an illumination source 4-2, which is used to provide illumination for the image collection area of the line scan camera 4-1.
[0047] In this embodiment, an illumination light source 4-2 is added to the two-dimensional image acquisition component 4, that is, a dedicated light source is provided for the line-scan camera 4-1 to improve the clarity of two-dimensional image information acquisition.
[0048] After the illumination light source 4-2 is added, the line scan camera 4-1 can be installed separately from the structured laser 3-2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More