

Realization method for mechanical arm calibrating and tracking system based on visual motion capture
A motion capture and tracking system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of initial state deviation, inability to restore, and difficulty in relative motion restoration, and achieve good application prospects and accurate calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The implementation of the method and system for robot arm joint calibration and joint angle calculation using a visual motion capture system according to the present invention will be described in detail below with reference to the accompanying drawings. In this example, the system can calibrate the joints of the manipulator (give the initial position of the joints), obtain the rotation angle of each motor in the joints in real time, and reproduce the scene in the three-dimensional virtual space.
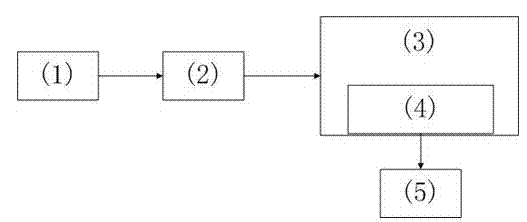
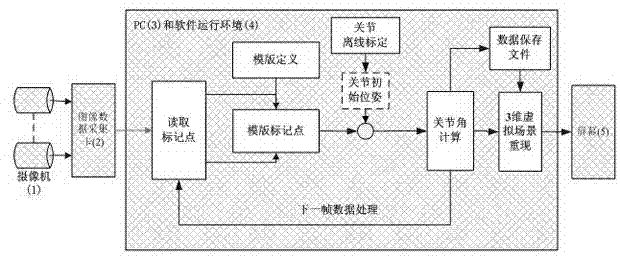
[0046] figure 1 The hardware structure diagram of the system is given. The whole system is composed of more than 8 cameras 1 , image data acquisition card 2 , main control computer 3 , visual software 4 , and external display screen 5 . The cameras are centered on the manipulator, with a radius of 3-5 meters and are evenly distributed in a ring shape. The height above the ground is 2-2.5 meters. The card transmits the collected data to the calibration program of the main con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More