

Wireless remote control robot capable of pruning standing trees
A technology of wireless remote control and robots, which is applied in the direction of agricultural machinery and tools, cutting tools, cutting equipment, etc., can solve the problems of difficult pruning of branches, high labor intensity, low efficiency, etc., to facilitate single-person operation, reduce labor intensity, The effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] Specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
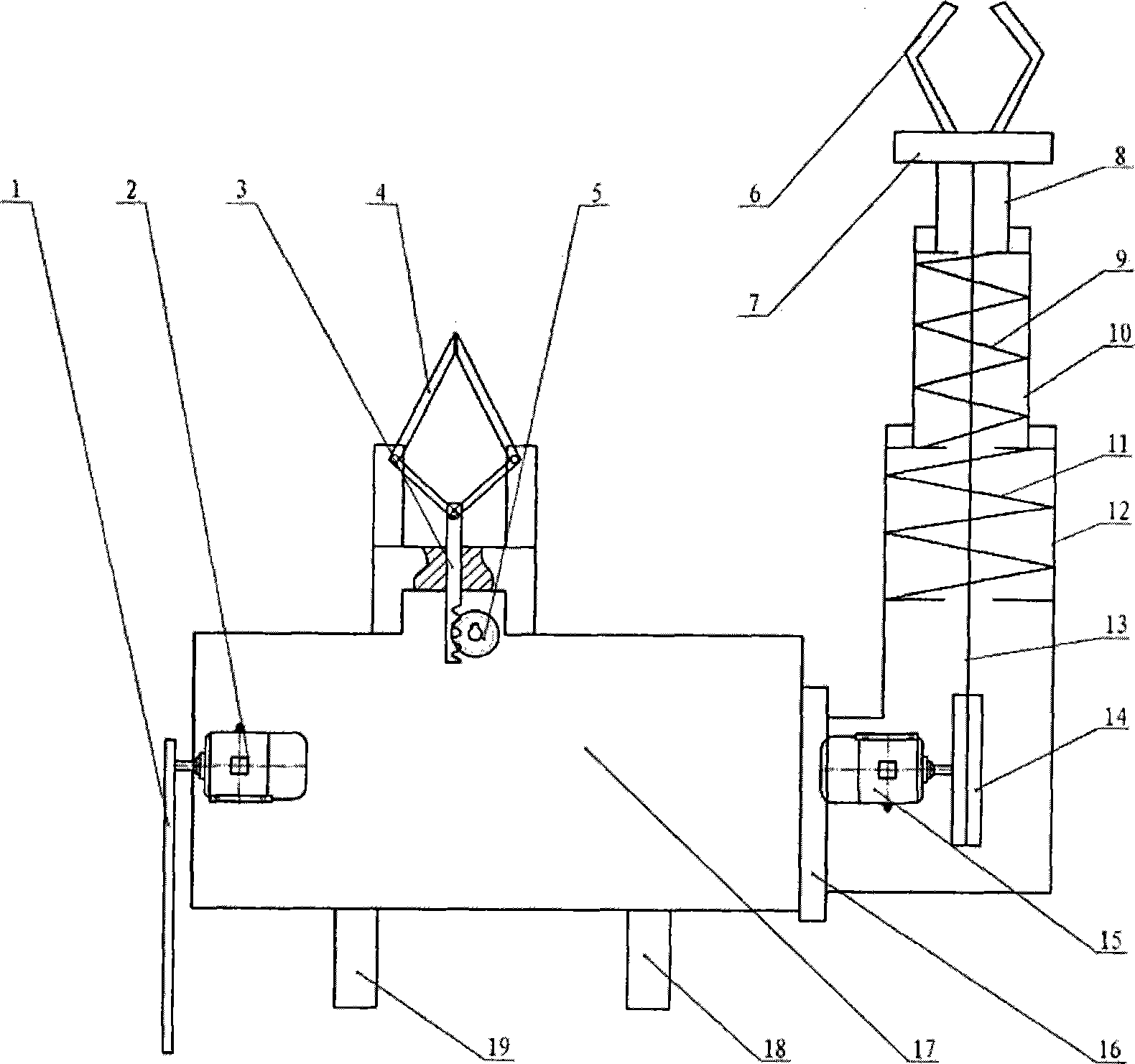
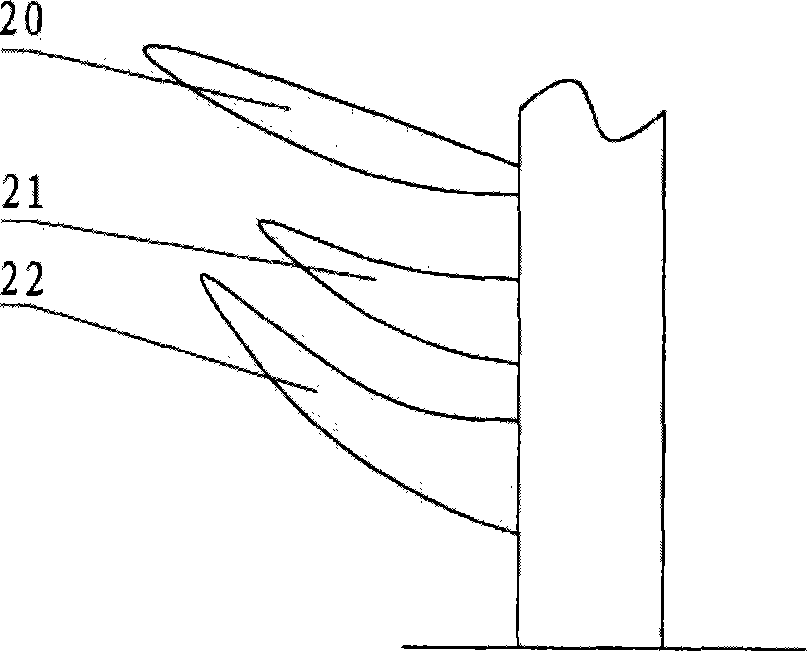
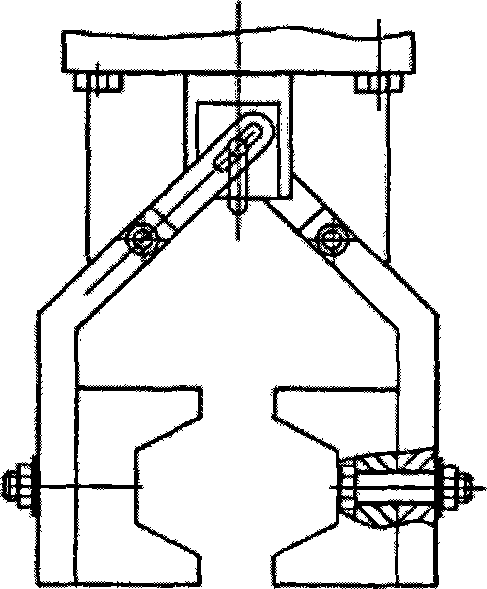
[0010] figure 1 It is a schematic diagram of the wireless remote control standing tree pruning robot, refer to figure 1 , the wireless remote control standing tree pruning robot includes a chain saw 1 and a swing motor 2 . Such as figure 2 Schematic diagram of trimming standing trees. During work, if the branches 21 and 22 of the standing trees need to be trimmed, the operator throws the rope onto the branches 20 with a rope gun and hangs around the branches 20. An iron ring is tied at one end of the rope, and the remote control motor rotates the gear 5 drives the tooth bar 3 to move down, makes the rope gripper 4 close and grabs the hoop on the rope, pulls the rope, and the wireless remote control standing tree pruning robot is raised to the lower part of the branch 21, and the first-level tube arm spring 9 and the tailstock spring Under th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More