Initiative-driving spiral pipeline robot
一种螺旋管道、主动驱动的技术,应用在机器人领域,能够解决驱动轮转速降低、无法前进、结构能量损失大等问题,达到扩大适用范围、方便精确控制、调节精度高的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
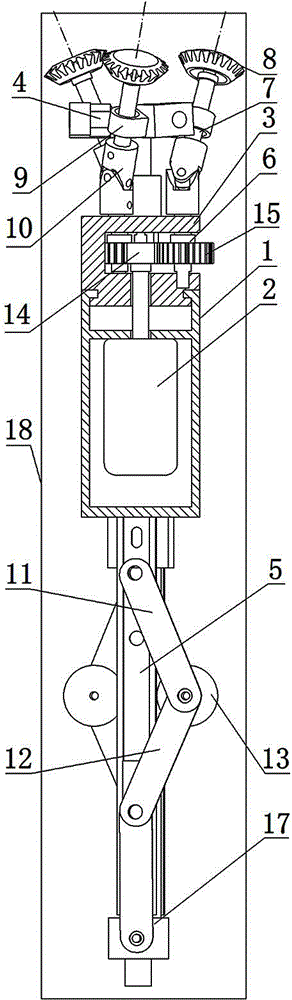
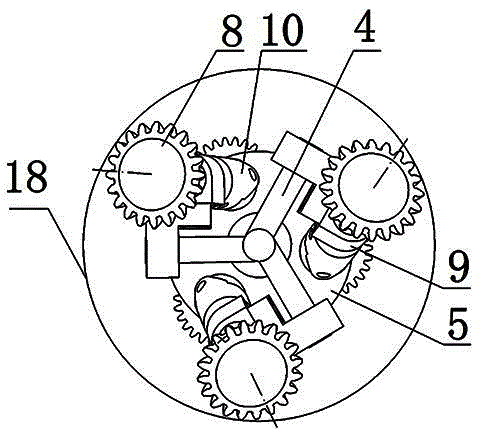
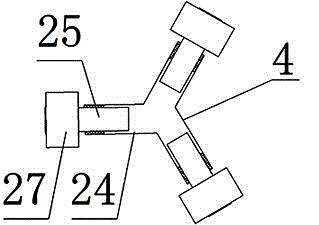
[0033] Such as figure 1 , figure 2 Shown, a kind of actively driven spiral pipe robot, it comprises driving wheel frame 3, body 1, guide wheel frame 5 and power unit 2, power unit 2 is fixed in body 1, and driving wheel frame 3 is rotatably installed on One end of the body 1, the guide wheel frame 5 is fixed on the other end of the body 1, and the driving wheel frame 3 is evenly distributed with three diameter reducing mechanisms 4 along the circumferential direction, that is, the angle between the adjacent variable diameter mechanisms 4 is 120 °, and the driving wheel frame 3 is also provided with a drive shaft 6 and a wheel shaft 7, and one end of the wheel shaft 7 is fixedly equipped with a drive wheel 8, the axis of rotation of the drive wheel 8 coincides with the axis of the wheel shaft 7, and each reducing mechanism 4 is provided with a bearing seat 9, Wheel shaft 7 is installed in the bearing housing 9 through bearings, drive shaft 6 is installed on the drive wheel fr...
Embodiment 2
[0038] Such as Figure 5 Shown, a kind of actively driven spiral pipe robot, it comprises driving wheel frame 3, body 1, guide wheel frame 5 and power unit 2, power unit 2 is fixed in body 1, and driving wheel frame 3 is rotatably installed on One end of the body 1, the guide wheel frame 5 is fixed on the other end of the body 1, the driving wheel frame 3 is provided with a variable diameter mechanism 4, the driving wheel frame 3 is also provided with a drive shaft 6 and a wheel shaft 7, and one end of the wheel shaft 7 The drive wheel 8 is fixedly installed, the axis of rotation of the drive wheel 8 coincides with the axis of the wheel shaft 7, the diameter reducing mechanism 4 is provided with a bearing seat 9, the wheel shaft 7 is installed in the bearing seat 9 through the bearing, and the drive shaft 6 is installed in the drive shaft through the bearing. On the wheel frame 3, the drive shaft 6 and the wheel shaft 7 are connected through a connector 10, the connector 10 is...
Embodiment 3
[0043] Such as Figure 9 Shown, a kind of actively driven spiral pipe robot, it comprises driving wheel frame 3, body 1, guide wheel frame 5 and power unit 2, power unit 2 is fixed in body 1, and driving wheel frame 3 is rotatably installed on One end of the body 1, the guide wheel frame 5 is fixed on the other end of the body 1, and the driving wheel frame 3 is evenly distributed with two diameter-reducing mechanisms 4 along the circumference, that is, the angle between the adjacent diameter-reducing mechanisms 4 is 180 °, and the driving wheel The frame 3 is also provided with a drive shaft 6 and a wheel shaft 7, and one end of the wheel shaft 7 is fixedly equipped with a drive wheel 8, the axis of rotation of the drive wheel 8 coincides with the axis of the wheel shaft 7, and each reducing mechanism 4 is provided with a bearing seat 9 , the wheel shaft 7 is installed in the bearing seat 9 through the bearing, and the driving shaft 6 is installed on the driving wheel frame 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More