

Noninvasive radiotherapy system for robot
A robotic system and radiotherapy technology, applied in X-ray/γ-ray/particle irradiation therapy, etc., can solve problems such as time-consuming, low treatment accuracy, and mismatched projection time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
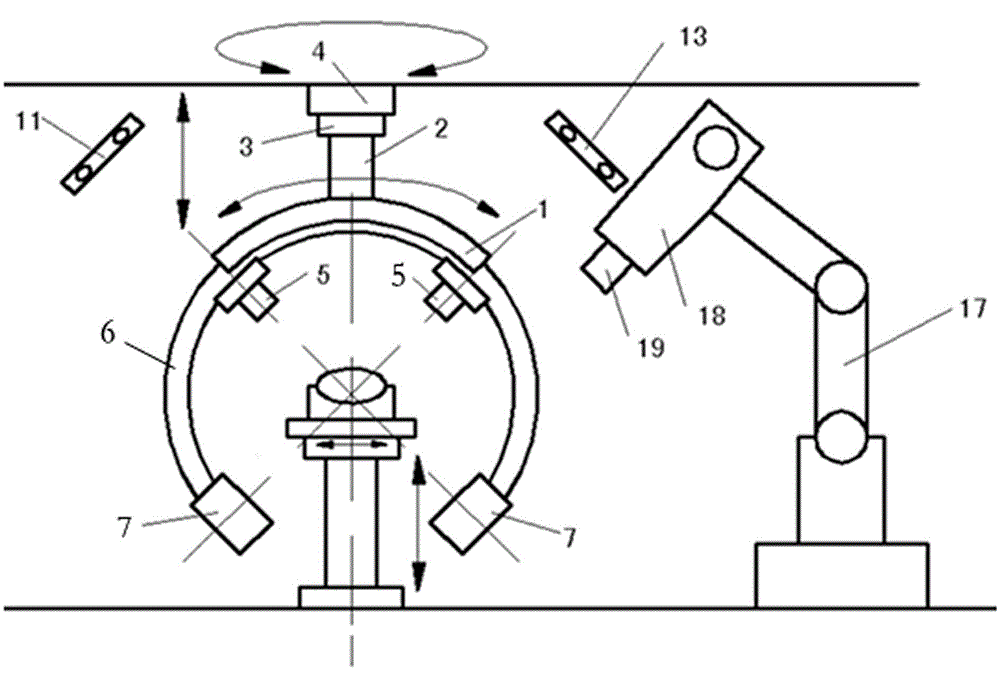
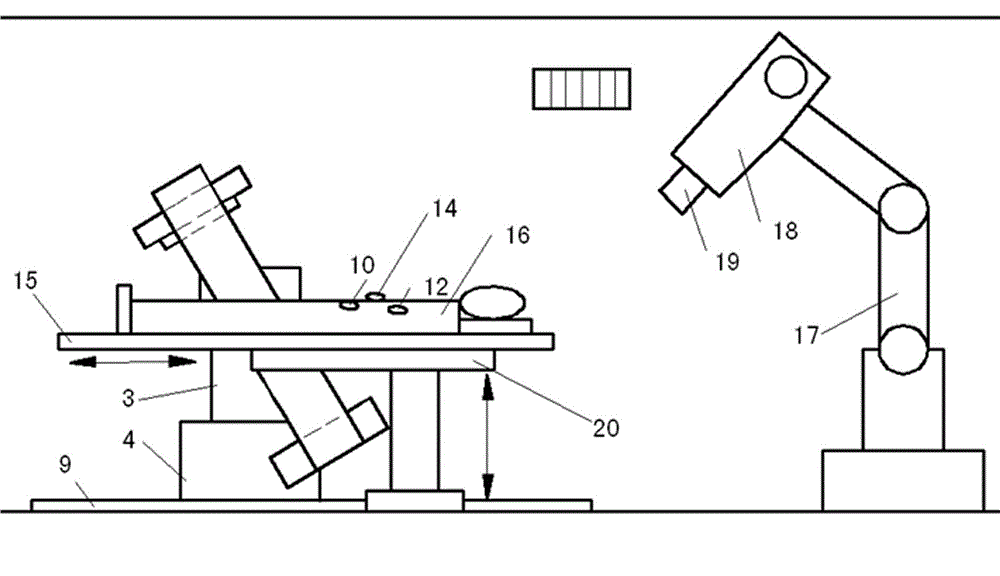
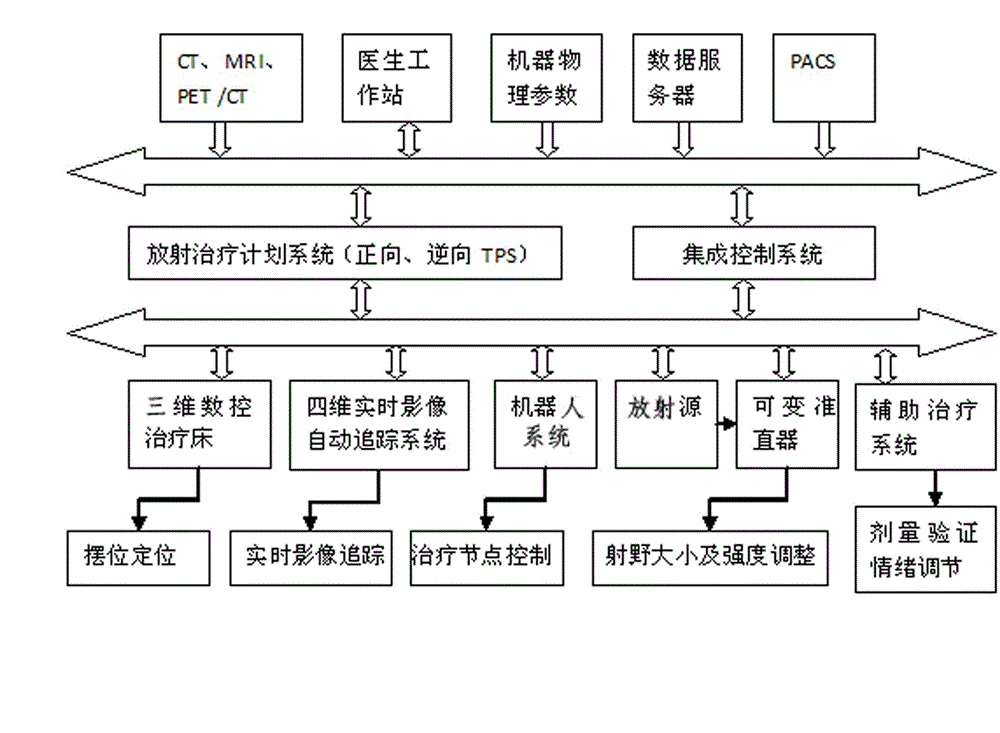
[0048] The robot non-invasive radiotherapy system in this example consists of seven modules: radiotherapy planning system, three-dimensional numerical control treatment bed 15, four-dimensional real-time image automatic tracking system, robot system 17, radiation source, auxiliary treatment system and data management platform; among them, radiotherapy The planning system is the core part of the system, and is connected to the three-dimensional numerical control treatment bed 15, the four-dimensional real-time image automatic tracking system, the robot system 17, the radiation source, the auxiliary treatment system and the integrated control system through the network; the three-dimensional numerical control treatment bed 15 is connected to the four-dimensional real-time image The automatic tracking system is connected; the four-dimensional real-time image automatic tracking system is connected with the robot system 17; the robot system 17 is connected with the radiation source; ...
Embodiment 2
[0057] The robot non-invasive radiotherapy system of this example is the same as the first embodiment except that the X-ray dynamic flat panel detector 7 is an amorphous silicon dynamic flat panel detector, and the real-time dose verification system is composed of an amorphous silicon electronic portal imaging system (EPID).
Embodiment 3
[0059] The robot non-invasive radiotherapy system of this example is the same as the first embodiment except that the X-ray dynamic flat panel detector 7 is an amorphous selenium dynamic flat panel detector, and the real-time dose verification system is composed of an amorphous selenium electronic portal imaging system (EPID).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More