

Silicon microgyroscope performance improving method and device based on force balance closed-loop control
A technology of silicon micro-mechanical and closed-loop control, which is applied in the direction of measurement devices, gyro effect for speed measurement, gyroscope/steering sensing equipment, etc. Coupling errors and other issues can be improved to improve detection accuracy and measurement and control performance, improve the signal-to-noise ratio of sensitive output, and eliminate quadrature errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The implementation steps of the silicon micromachined gyroscope performance improvement method based on force balance closed-loop control in this embodiment are as follows:
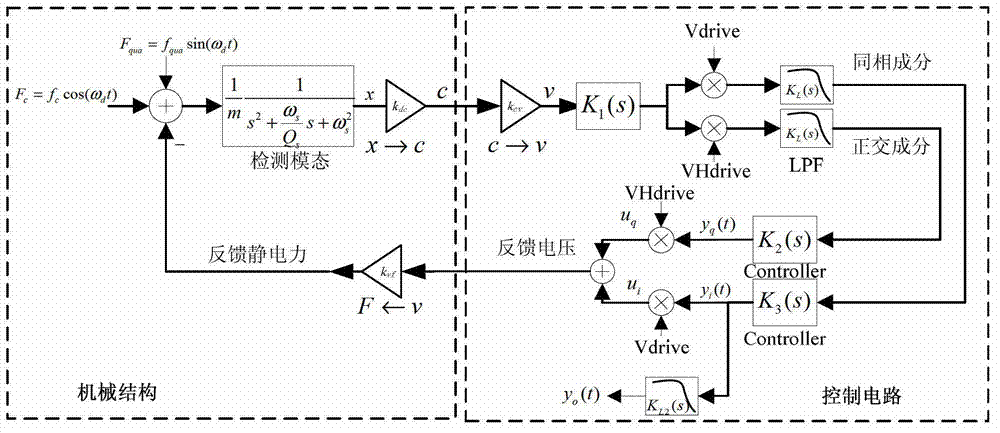
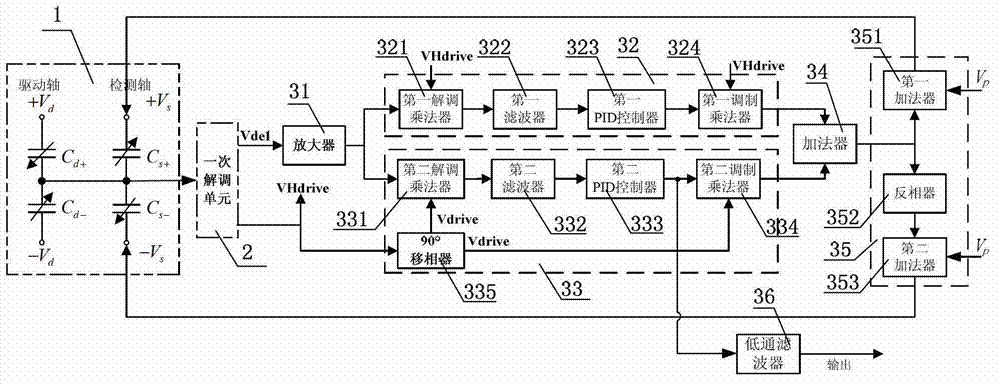
[0035] 1) Amplify the detection signal output by the primary demodulation unit of the silicon micromechanical gyroscope in sequence, perform secondary demodulation, filtering, and PID control according to the driving signal to obtain the amplitude of the quadrature coupling error signal, and convert the amplitude of the quadrature coupling error signal to Modulating to the drive signal to obtain a quadrature coupling error signal;
[0036] 2) The drive signal output by the primary demodulation unit of the silicon micromachined gyroscope is shifted by 90° to obtain the drive quadrature signal, and the detection signal output by the primary demodulator unit of the silicon micromachined gyroscope is amplified in sequence, and according to the drive quadrature signal Perform secondary demodulation, fil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More