

High-speed and high-accuracy magneto-rheological grease flexible manipulator connection rod and multi-connection-rod manipulator system
A flexible manipulator and magnetorheological grease technology, applied in the field of manipulators, can solve the problems of dynamic characteristics, large end load, large structure size, etc., and achieve fast and flexible operation, simple control mechanism, and good vibration reduction effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
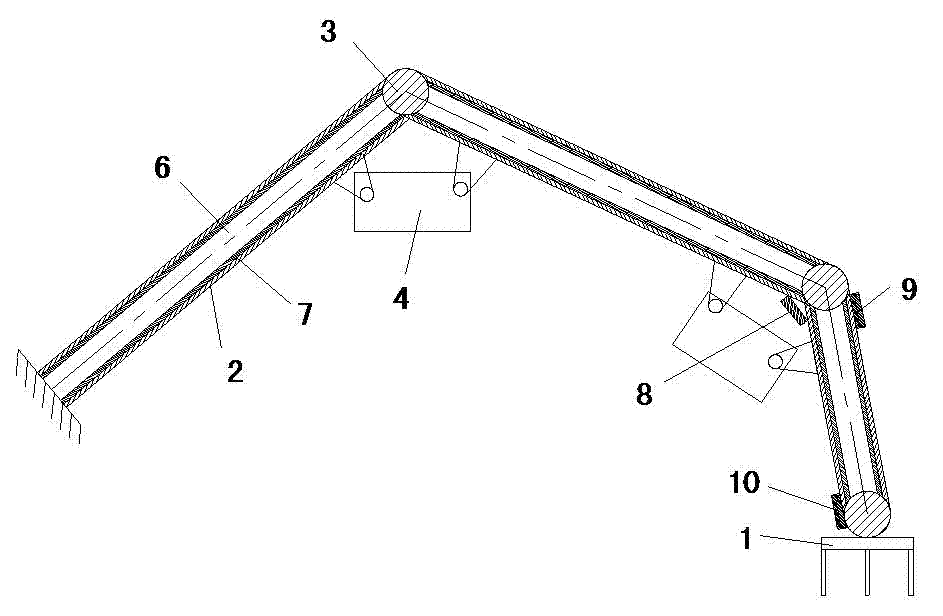
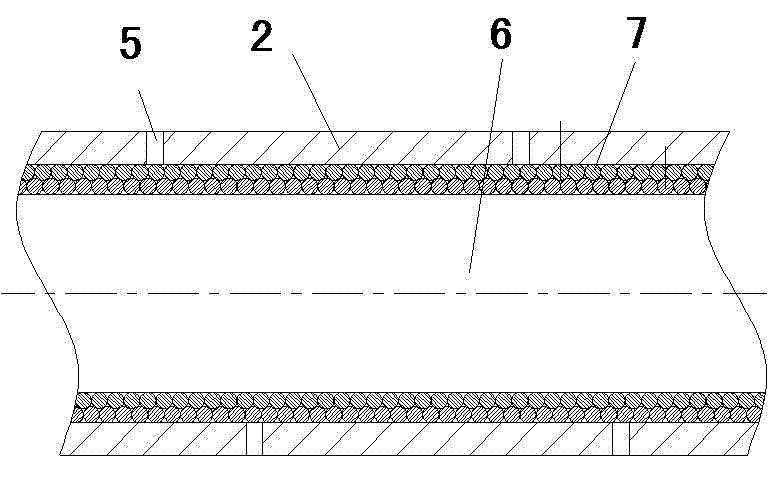
[0023] Such as figure 1 As shown, it is a structural schematic diagram of an embodiment of the high-speed and high-precision magnetorheological grease flexible multi-link manipulator system of the present invention. The high-speed and high-precision magneto-rheological grease flexible multi-link manipulator system of this embodiment includes an end gripper 1, at least two manipulator links 2 and an excitation coil 7 arranged in the manipulator link 2 The power supply device for power supply is connected to the connecting rods 2 of the two mechanical arms through the hinged connection of the hinge shaft 3, and the connecting rods 2 and the hinged shafts 3 are coupled by magneto-rheological grease, and the two adjacent connecting rods 2 of the mechanical arms A driving vibration controllable device 4 for driving the action of the mechanical ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More