

Negative pressure absorption climbing type robot used for detecting fissure of bridge
A robot and climbing technology, applied in the field of negative pressure adsorption climbing robots, can solve problems such as affecting work efficiency, affecting people's observation and judgment, and different judgment results, achieving a high degree of automation and reliability. , Eliminate subjective interference factors, the effect of fast and accurate detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
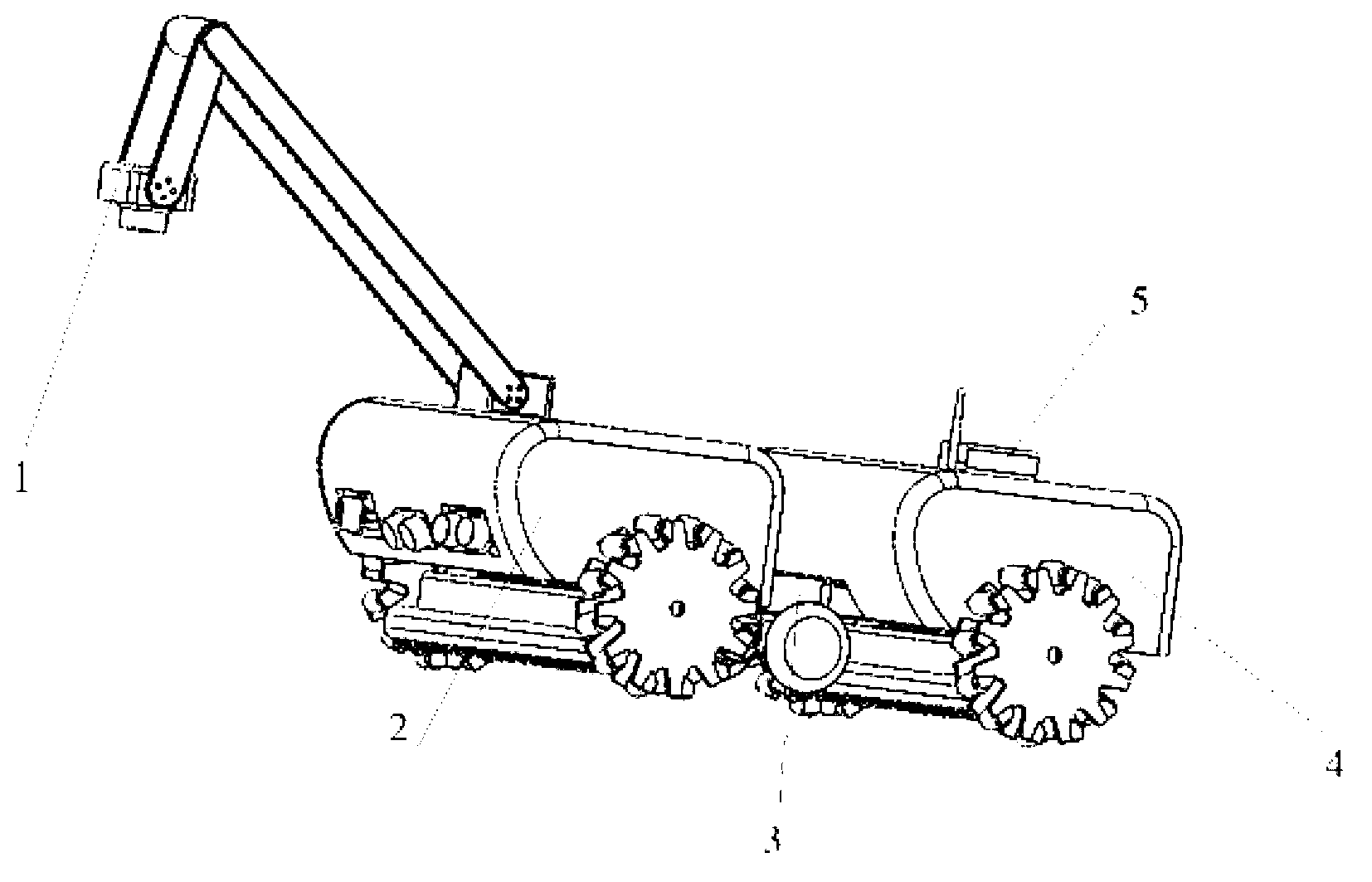
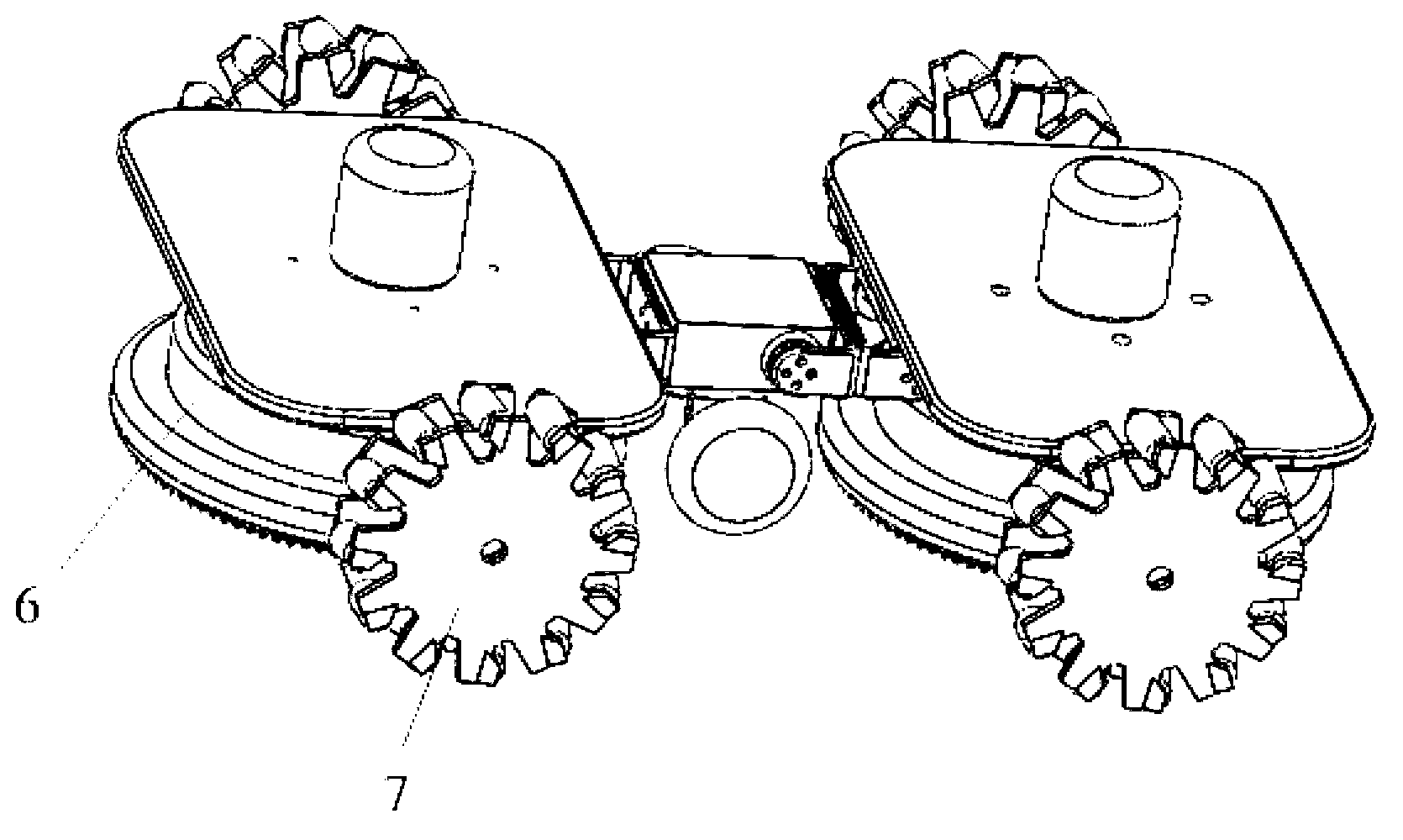
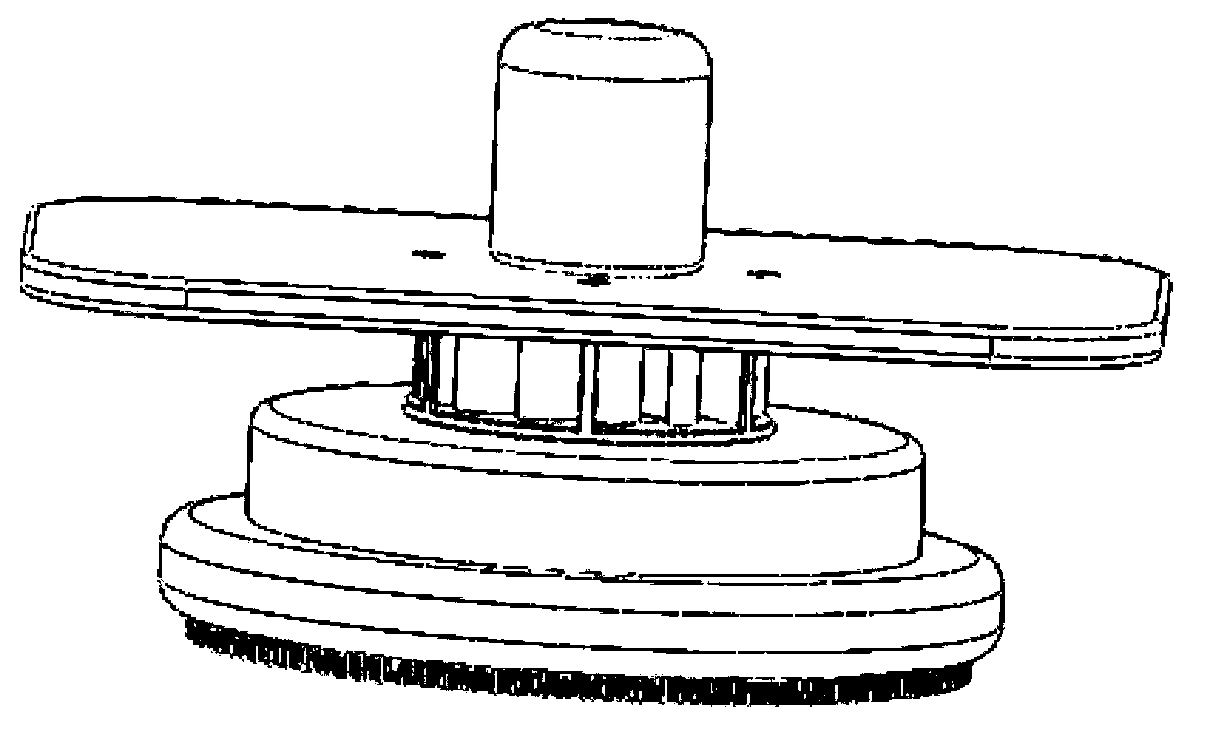
[0032] figure 1 It is a schematic diagram of the overall structure of the negative pressure adsorption climbing robot according to the present invention. Such as figure 1 As shown in , the negative pressure adsorption climbing robot mainly includes a camera unit 1, a front mechanical foot 2, a rear mechanical foot 4 and a wireless communication unit 5, wherein the front mechanical foot 4 and the rear mechanical foot 4 are connected to each other through a joint coupling mechanism 3 , they each have a negative pressure adsorption component 6 and a driving walking component 7, so that they can be a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More