

Control system of remote-controlled rescue robot
A rescue robot and control system technology, which is applied in the field of program-controlled manipulators, can solve problems such as inability to control the robot's attitude, and achieve the effects of convenient later maintenance, carrying and transportation, strong portability, and good versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Specific embodiments of the present invention are given below and described in conjunction with the accompanying drawings.
[0018] This invention is a patent applied for the deformable crawler-type rescue robot HEU-RB developed by the Institute of Mechanical Design and Theory of Harbin Engineering University. The name of the patent authorization: the main arm telescopic and variable configuration obstacle-climbing mechanism, the application number: 201110174696 , Authorized announcement number: CN202130524U. The system supports deformable tracked robots such as double auxiliary arms or four auxiliary arms.
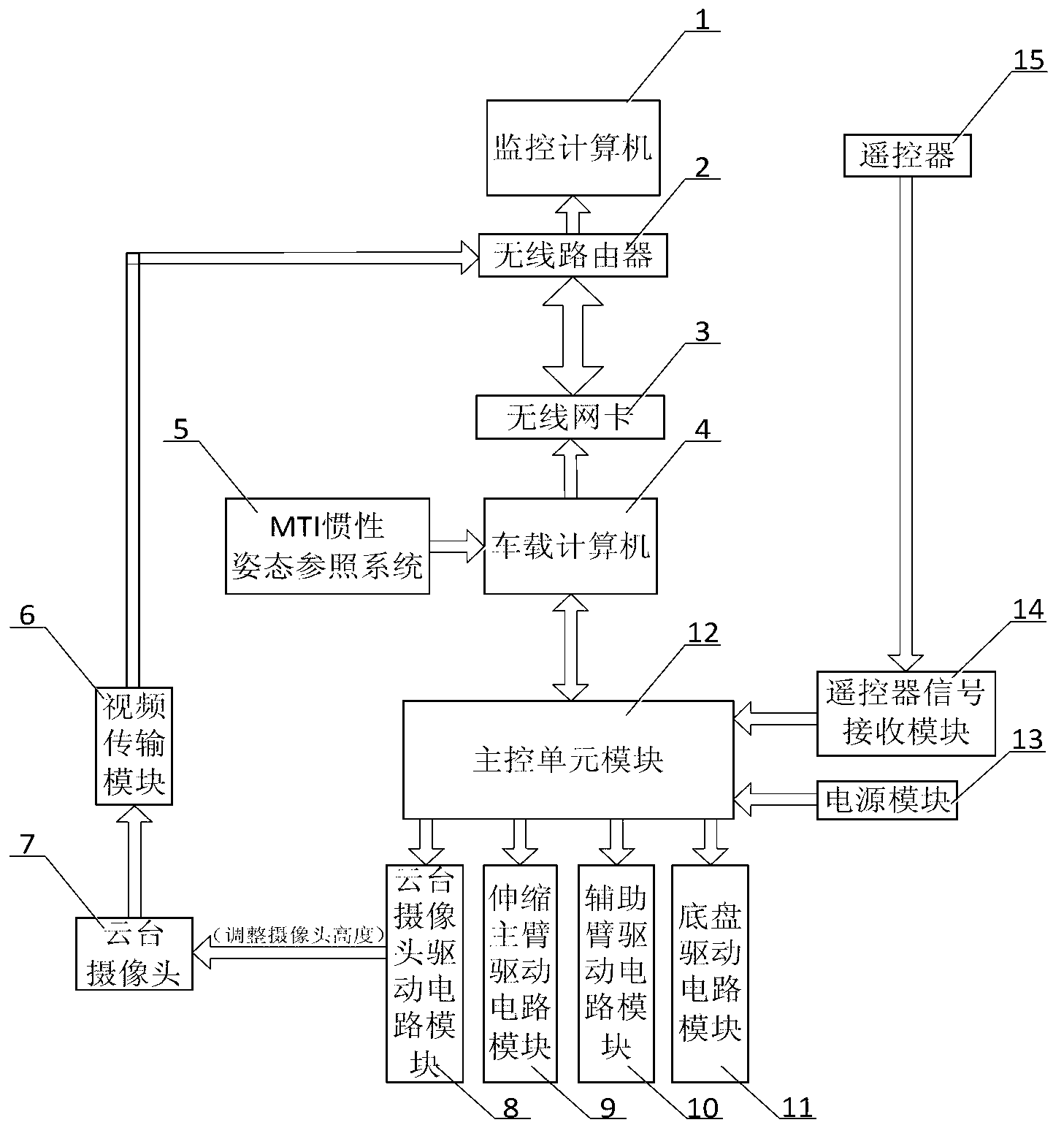
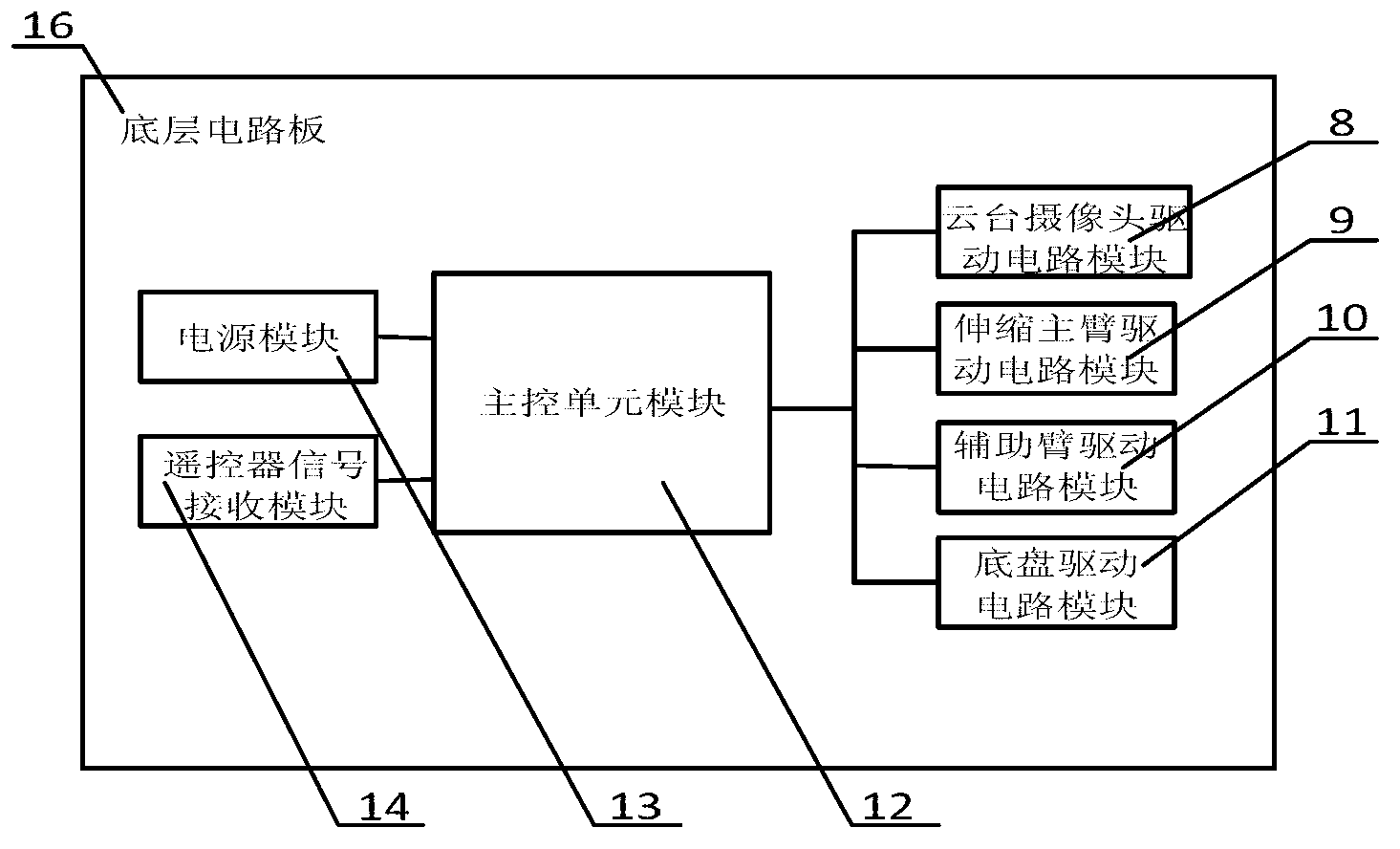
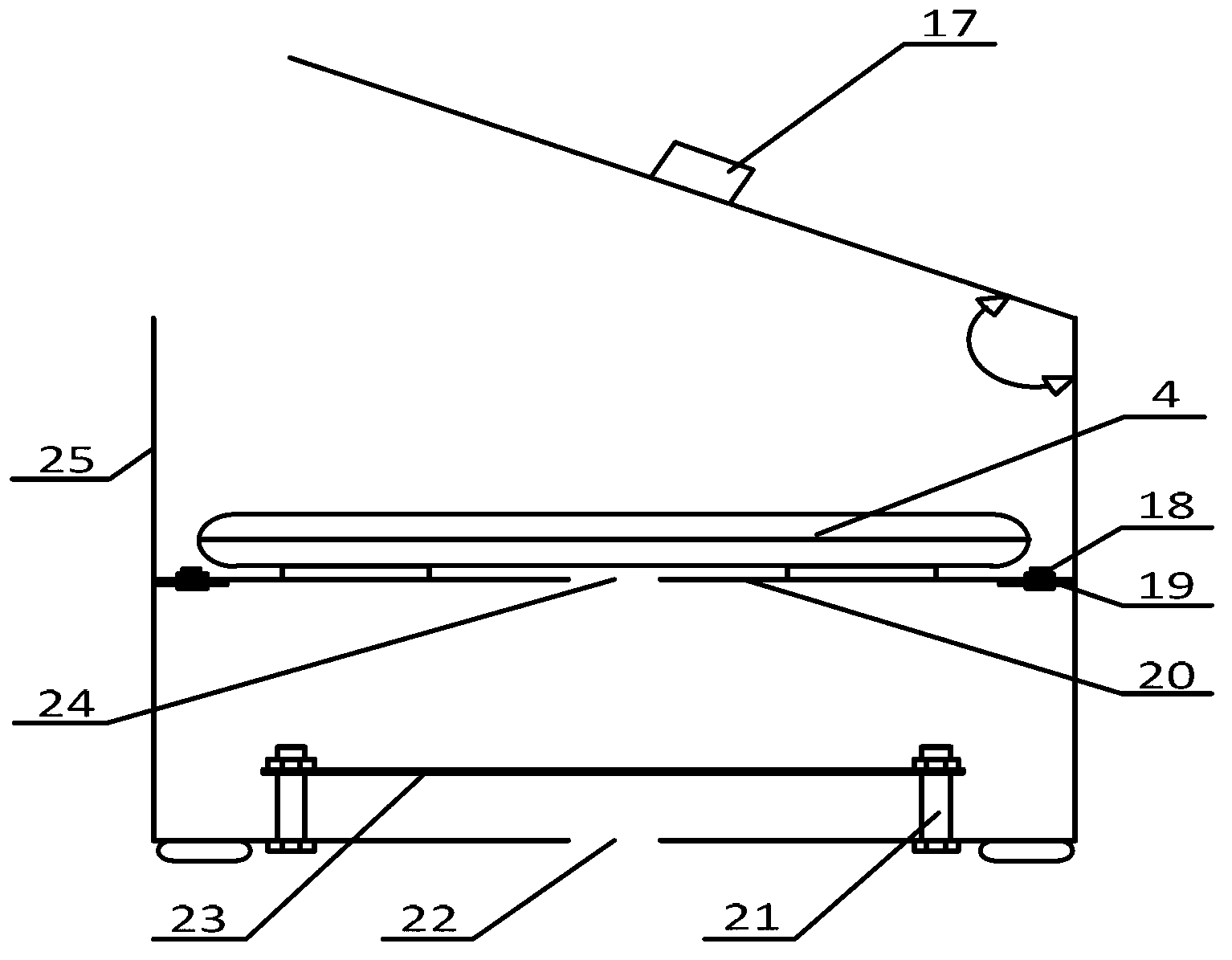
[0019] Such as figure 1 , 2 As shown, a control system for remotely operating a rescue robot, which remotely operates the rescue robot body 25 through a wireless network, includes: a control terminal monitoring computer 1, a remote control 15, an on-board computer 4, a main control unit module 12, and a chassis drive circuit Module 11, telescopic main arm drive ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More