

Networked distribution type multiple-mobile-robot system
A mobile robot, distributed technology, applied in the direction of comprehensive factory control, electrical program control, comprehensive factory control, etc., can solve the problem of robots without too many sensors, multi-mobile robot system service objects or working environment restrictions, affecting multi-robot collaboration, etc. problems, to achieve the effect of reducing complexity, facilitating development, and facilitating changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
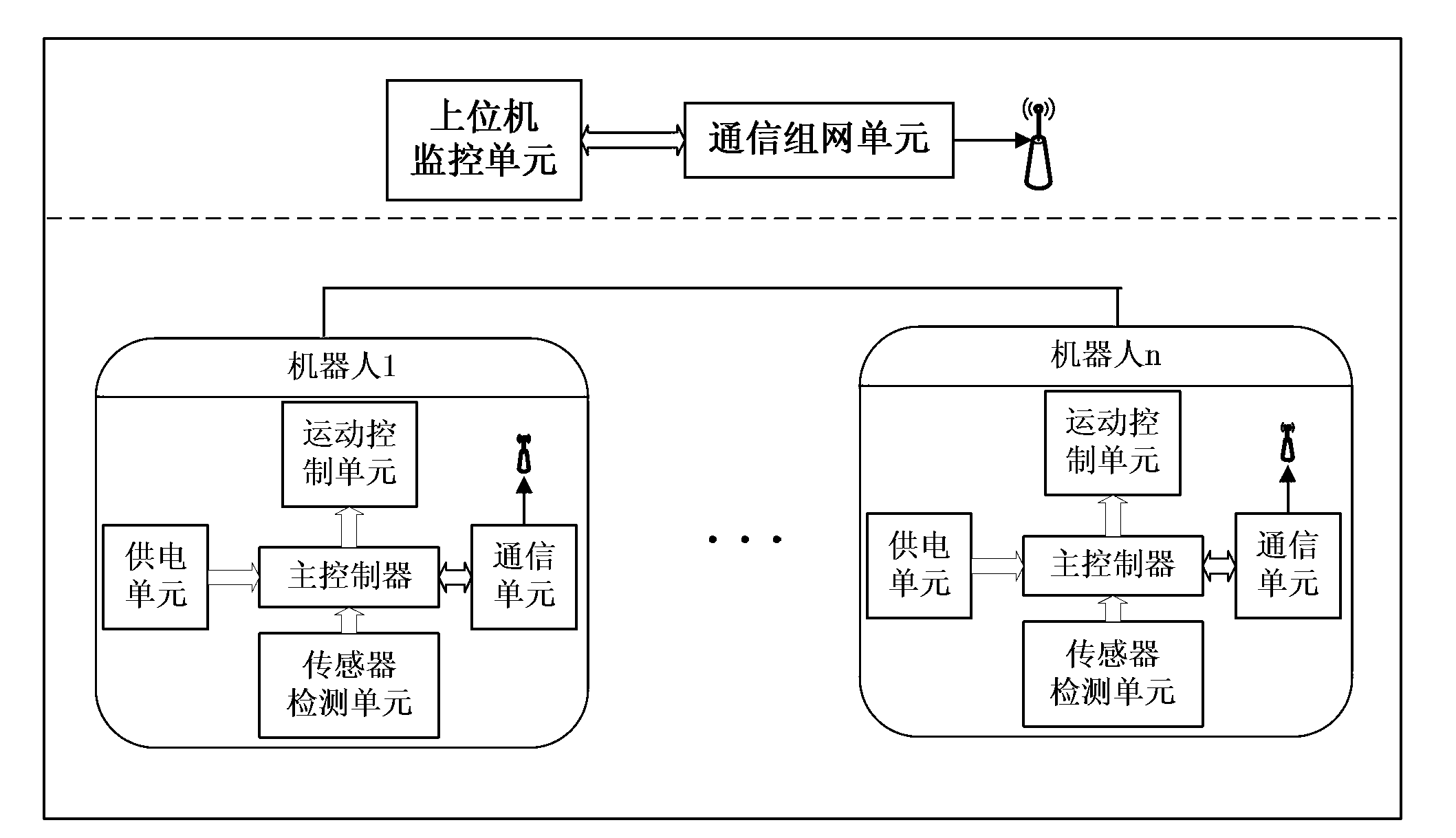
[0033] figure 1 The schematic diagram of the networked distributed multi-mobile robot system provided by the embodiment of the present invention is shown in the figure: a networked distributed multi-mobile robot system provided by the present invention includes a host computer measurement and control system and a multi-mobile robot group,
[0034] The upper computer measurement and control system includes an upper computer monitoring unit and a communication networking unit;
[0035] The host computer monitoring unit is used to display the state information and speed information of multiple mobile robot groups in real time, and send instructions to change the motion sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More