

Multi-feature multi-sensor method for mobile robot to track moving body
A mobile robot, multi-sensor technology, applied in instruments, image data processing, computing, etc., can solve the problem of difficult to obtain tracking effect, without considering the relationship between human and machine position, etc., to improve the description ability and reduce the possibility of tracking failure , to avoid the effect of model offset
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
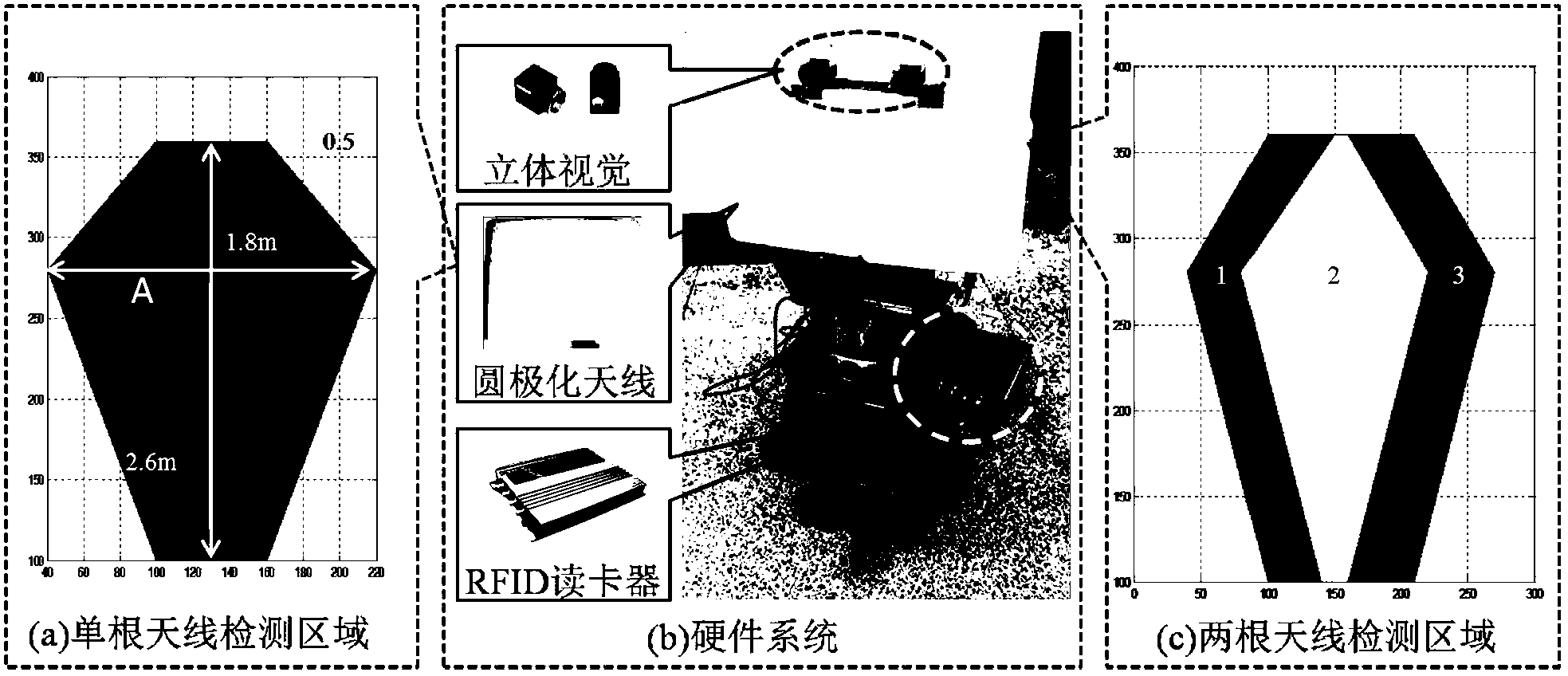
[0112] The hardware structure involved in the present invention is as figure 1 (b) shown. The stereo vision system used in the experiment is built by two FLEA2 cameras from Point Gray Company. The maximum imaging resolution of the camera is 1024×768, and the focal length is 3.5mm. The RFID system consists of a UHF card reader and two 8DBi circularly polarized antennas. The target body carries a passive RFID tag. The experimental hardware platform is a Pioneer3-DX robot.
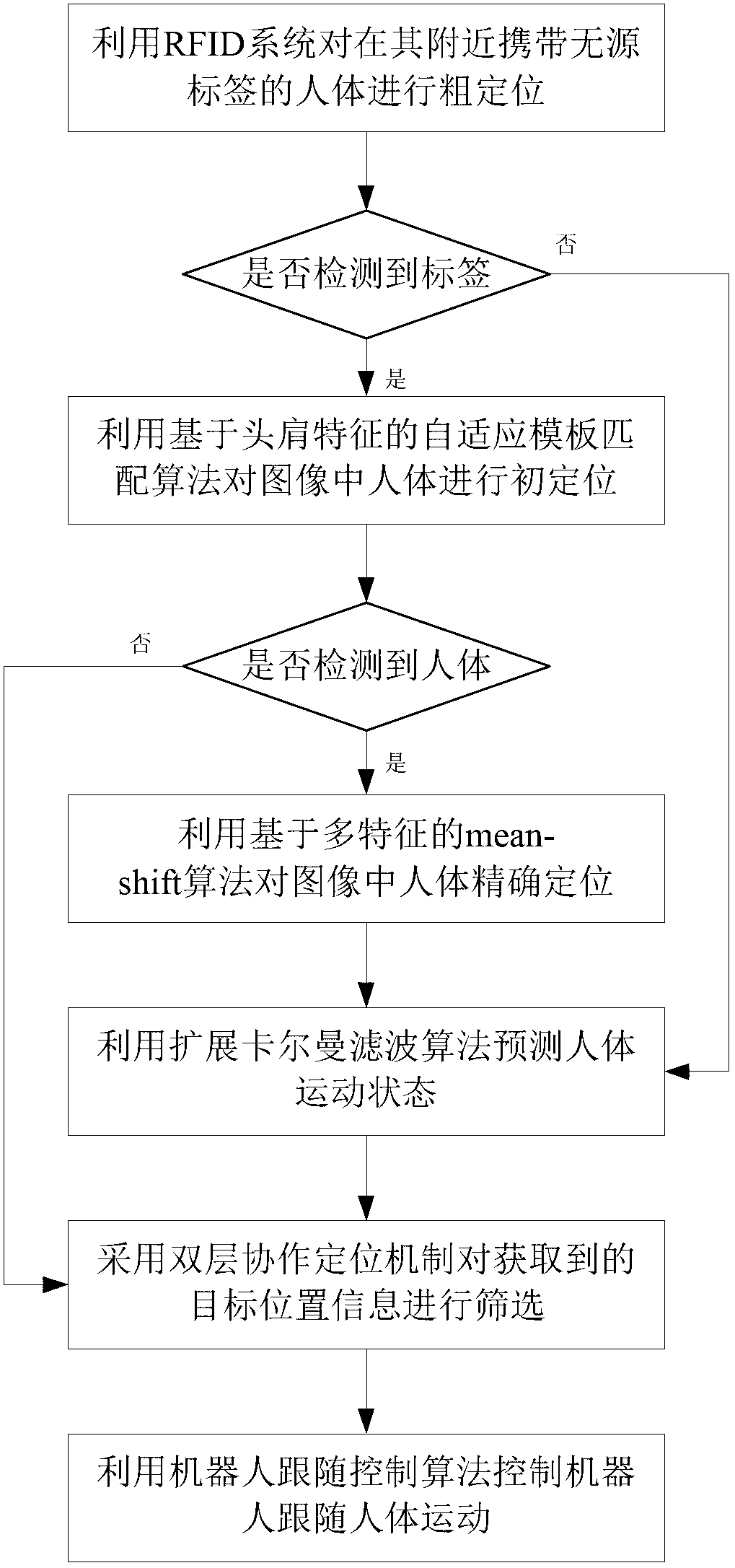
[0113] The flow chart of the multi-feature and multi-sensor mobile robot tracking method is as follows: figure 2 shown, including the following steps:
[0114] Step 1, use the RFID system to roughly locate the human body carrying the passive tag nearby. If the tag is detected, go to the next step; otherwise, go to step four.
[0115] The specific method is as follows:
[0116] (1) Establish RFID sensor model
[0117] Establish the RFID antenna model: fix the antenna at a certain position indoors, and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More