

Steel plate wall climbing robot
A wall-climbing robot and steel plate technology, applied in the field of artificial intelligence, can solve the problems of unstable physical and chemical properties, high manufacturing and maintenance costs, energy consumption and running speed, etc., to achieve good controllability, simplified mechanical structure, reduced volume and The effect of weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
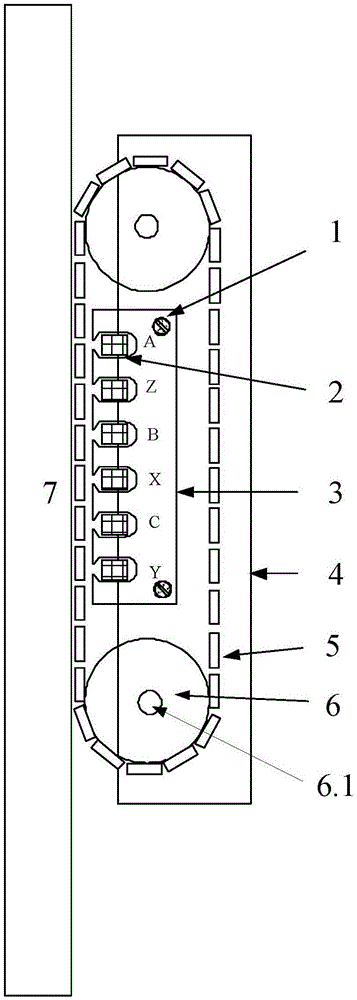
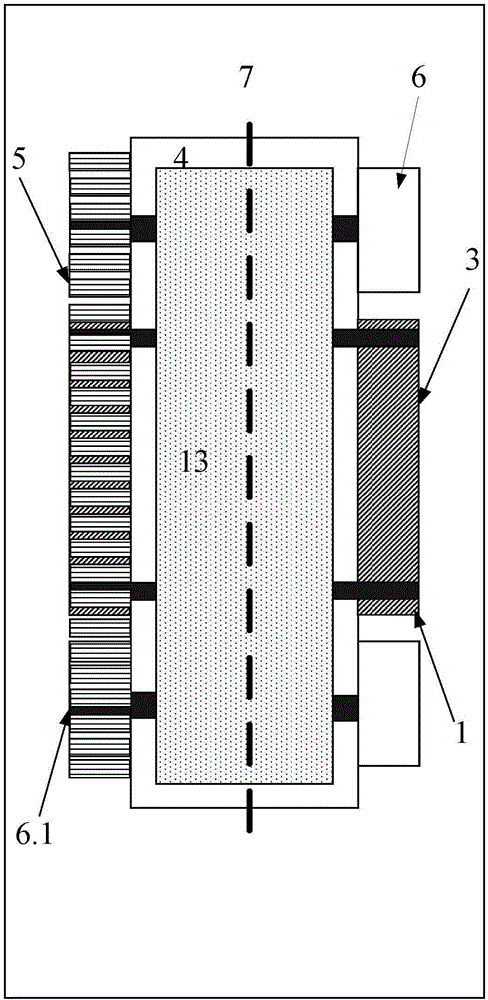
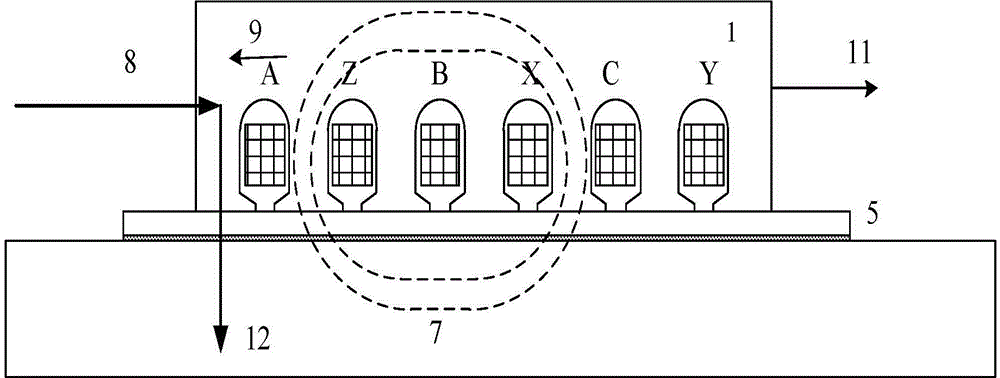
[0029] The steel plate wall-climbing robot shown in the figure, comprises chassis 4 and the traveling device that is installed on the chassis 4, and operating device 13 is installed on the chassis 4, and the traveling device is arranged on the left and right sides of chassis 4, and the traveling device is installed on the The crawler belt 5 on the chassis 4 is composed of a winding 2 and an iron core 3 respectively in the range surrounded by the crawler belts 5 on the left and right sides of the chassis 4. The iron core 3 is installed on the chassis 4, and the crawler belt 5 is supported by the sprocket. In contact with the winding 2 and the iron core 3, the sprocket 6 is respectively arranged on the front and rear sides of the iron core 3, the sprocket 6 can also be made into an integral structure with the iron core 3, and the sprocket 6 is conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More