

Three-freedom-degree constant speed decoupling space robot active spherical wrist and universal compliant control method
A space robot and constant velocity gimbal technology, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of spherical wrist gimbal compliant control mode of space robots without three degrees of freedom constant velocity decoupling, and achieve uniform speed control Simple and easy to implement, realize the effect of motion decoupling, and realize the effect of constant velocity and large angle rotation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Specific embodiments of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
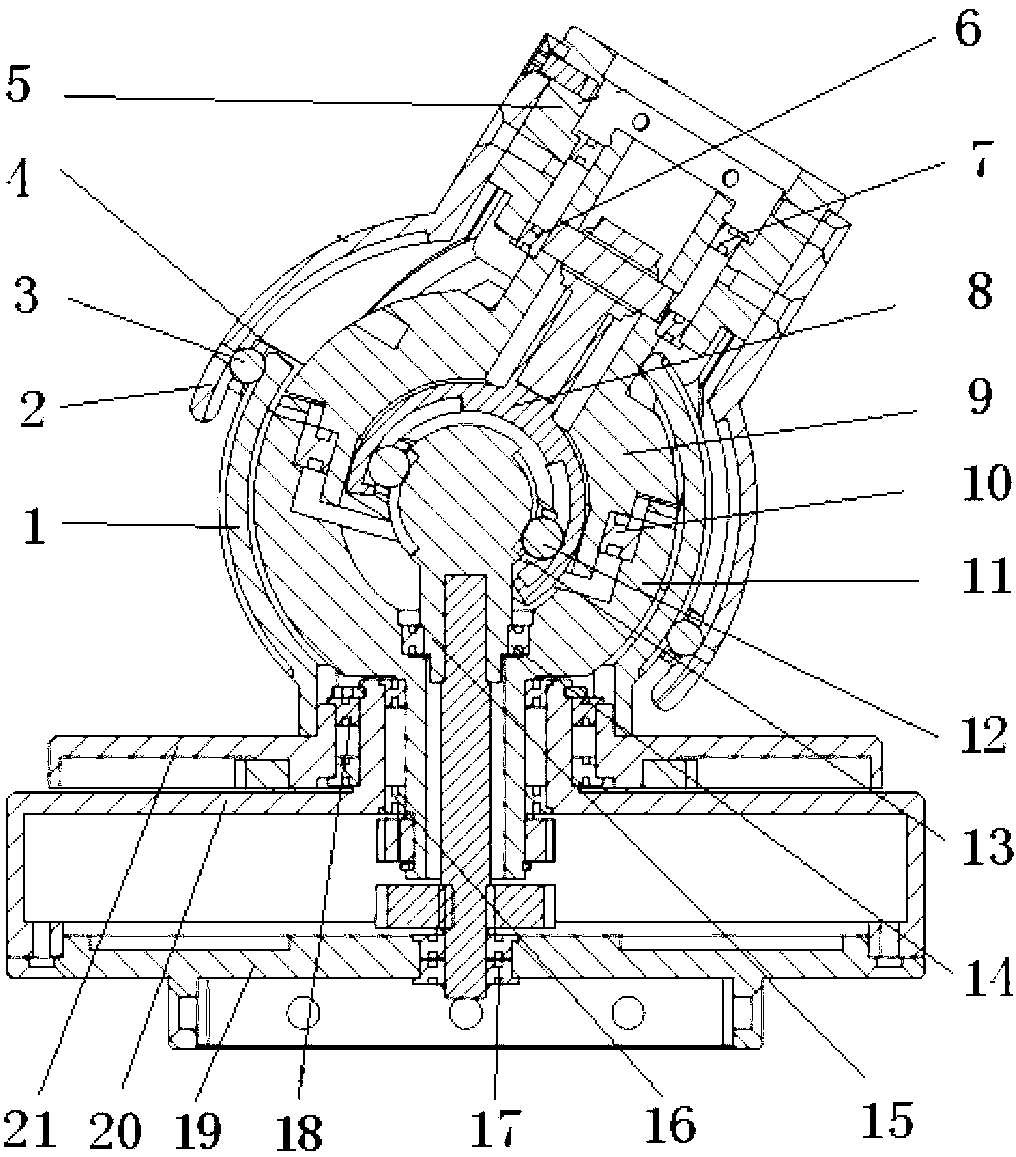
[0057] combined with figure 2 , Figure 3(A) and 3(C) Explain the realization of the three-degree-of-freedom constant-velocity decoupling spherical wrist side swing and pitch motion. The active wrist of the three-degree-of-freedom constant-velocity decoupling spherical robot includes an internal spherical cage constant velocity universal joint, which includes a spherical shell 8, six Steel ball 12, steel ball cage 13 and star-shaped sleeve 15, the power is transmitted from star-shaped sleeve 15 to spherical shell 8 through steel ball 12 for output, spherical shell 8 and star-shaped sleeve 15 have the same spherical center, that is, the inner spherical cage is constant velocity The center of rotation of the gimbal.
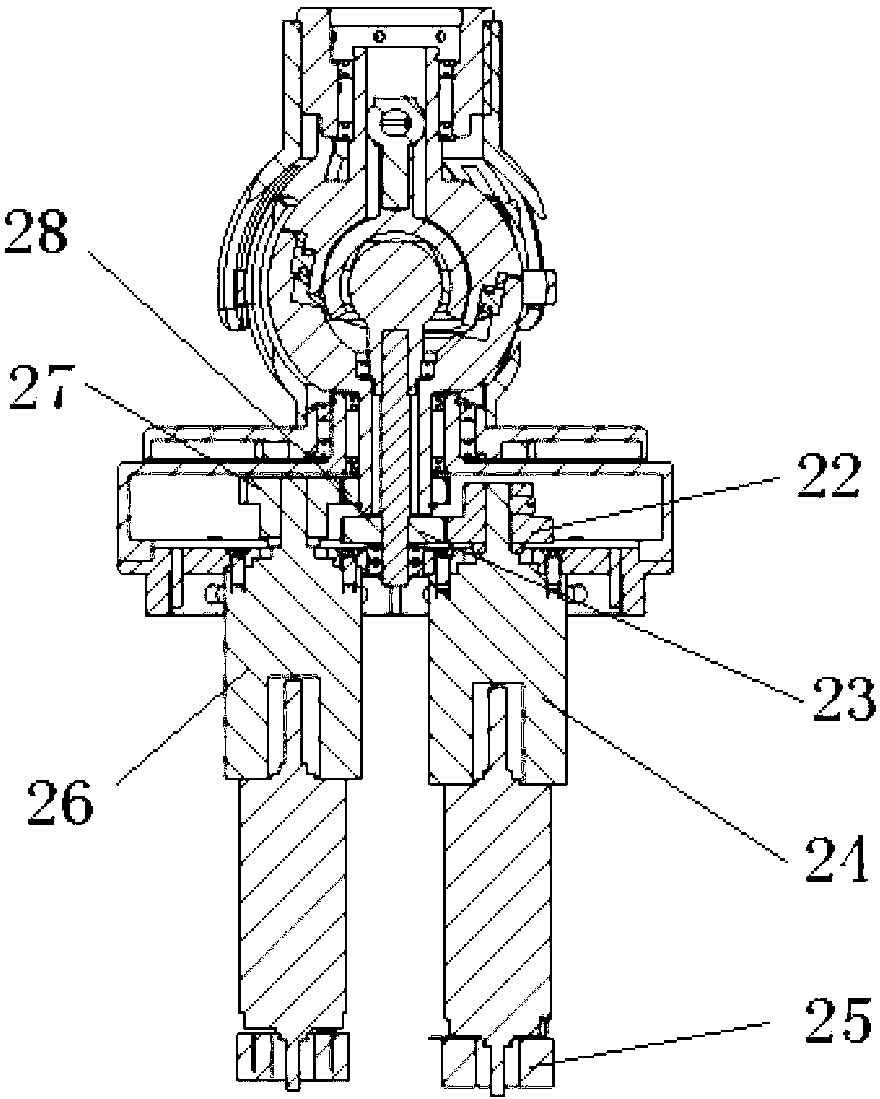
[0058]The side swing and pitch motion mechanism of the active wrist of the three-degree-of-freedom consta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More