Robot control method based on Ethercat
A control method and robot technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of weak anti-interference, poor scalability, unsuitable for high-speed occasions, achieve good real-time performance, and solve the problem of slow serial port speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
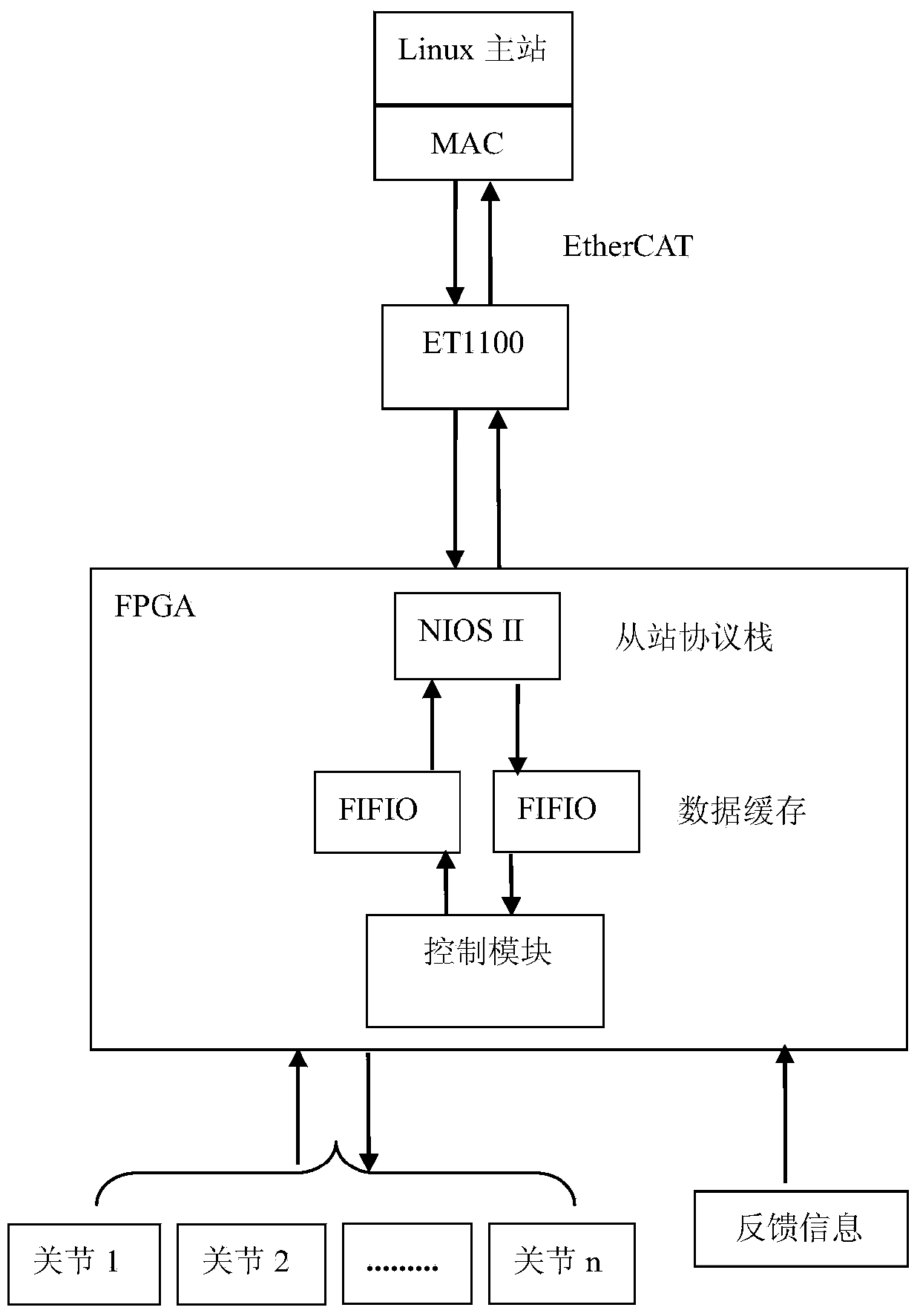
[0019] Embodiment 1: see figure 1 , a kind of robot control method based on Ethercat, comprise adopting the master station of real-time linux system and FPGA slave station, described FPGA slave station comprises soft-core NIOS II processor, two parallel high-speed FIFIO registers and control module, described The master station adopts real-time linux system, completes the master station protocol stack under the real-time operating system, and its slave station adopts ET1100 special chip, which is used to complete the data transmission between the master station and the slave station, so that the way of using hardware can guarantee The best real-time performance, the master station is bidirectionally connected with the soft-core NIOS II processor of the FPGA slave station through the ET1100 special chip, and the system uses the soft-core NIOS II processor of the FPGA slave station to realize the Ethercat Ethernet protocol stack of the slave station, Described FPGA slave station...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com