

Long journey continuing wind power driven type spherical robot in polar region
A spherical robot, driven technology, applied in auxiliary drives, motor vehicles, power units, etc., can solve the problems of poor load capacity, excessive load, large load, etc., to improve freedom and flexibility, easy installation, simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
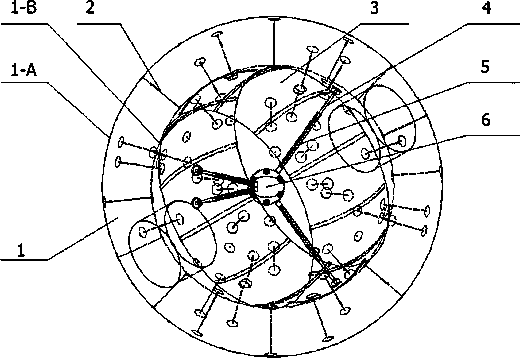
[0025] see figure 1 , the polar long-endurance wind-driven spherical robot includes a double-layer flexible airbag spherical shell (1), a solar film (3) and an internal rigid spherical shell (6), characterized in that: the double-layer flexible airbag spherical The inner and outer spherical shells (1-A, 1-B) of the shell (1) are connected by several evenly distributed pull ropes (2), and the double-layer spherical shell (1) forms an independent air cavity; the internal rigidity The spherical shell (6) is located at the center of the sphere, and is connected to the inner spherical shell (1-B) through four support tubes (5), with a built-in control system and power supply module; the solar film (3) is installed on the inner spherical shell ( 1-B) On the wall, it is connected with the power module in the rigid spherical shell (6); the support tubes (5) are hollow and each support tube (5) is connected with a corresponding spring damping device (4); The robot is passively driven ...
Embodiment 2
[0027] This embodiment is basically the same as Embodiment 1, and the special features are as follows: the double-layer flexible airbag shell (1) is made of soft material, which is thermoplastic polyurethane elastic composite material TPU, which has elasticity and deformability, and is airtight and transparent , Beautiful appearance. The flexible airbag spherical shell (1) is composed of inner and outer spherical shells (1-A, 1-B), which greatly reduces the inflation ratio and solves the problem of slow inflation of large-sized flexible spheres. The support tube (5), the inner rigid spherical shell (6) and the spring damping device (4) constitute the rigid structure of the spherical robot.
Embodiment 3
[0029] This embodiment is basically the same as Embodiment 1, and the special features are as follows: see Figure 1~Figure 5 , the polar long-endurance wind-driven spherical robot, including a double-layer flexible airbag spherical shell (1), several pull ropes (2), solar film (3), an internal rigid spherical shell (6), and four support tubes (5) and spring damping device (4).
[0030] The support tube (5), the inner rigid spherical shell (6) and the spring damping device (4) constitute the rigid structure of the spherical robot.
[0031] The double-layer flexible airbag shell (1) is made of soft material, which is thermoplastic polyurethane elastic composite material TPU, which has elasticity and deformability, is airtight and transparent, and has a beautiful appearance. The flexible airbag spherical shell (1) is composed of inner and outer spherical shells (1-A, 1-B), which greatly reduces the inflation ratio and solves the problem of slow inflation of large-sized flexible...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More