

Method of filtering airborne LiDAR (Light Detection and Ranging) point cloud
A point cloud and point cloud data technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as the destruction of complex terrain structure features, avoid blindness and the tediousness of frequent adjustment of filtering parameters, and avoid point cloud accuracy. loss, the effect of high filtering accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
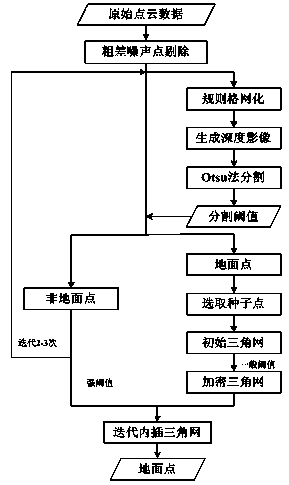
[0038] like figure 1 As shown, an airborne LiDAR point cloud filtering method includes the following steps:
[0039] 1. Preprocess the original point cloud data and remove gross noise points;
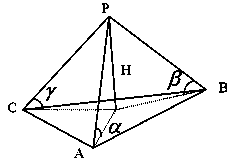
[0040] The CSite2 reference data published online by ISPRS is selected as the experimental data, and the area of the experimental area is 630×420m 2 , the number of points is 243,400. There are complex houses, large buildings and data holes in the area, and the average point distance is 1-1.5m. The point cloud data in the experimental area are classified manually or semi-manually, and each point is marked as a ground point or a non-ground point. Take any point P i is the target point, r is the radius of the search circle, searching for adjacent points, if for any point P j :
[0041] Z j -Z i ≥ΔZ max ,P j ∈A
[0042] where A is the search area, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More