

Picking robot and picking method for kiwi fruits
A technology for picking robots and kiwifruit, which is applied to picking machines, harvesters, agricultural machinery and tools, etc., can solve the problems of high cost, high labor intensity, and low efficiency, and achieve the goal of reducing weight, labor intensity, and complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
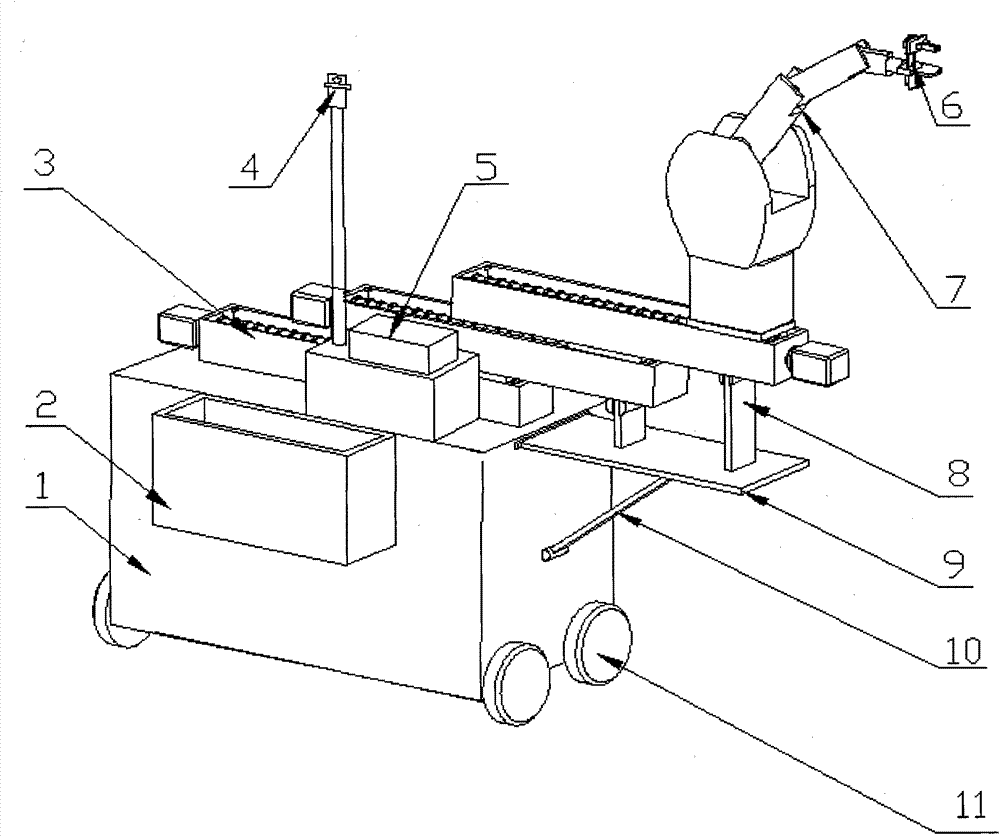
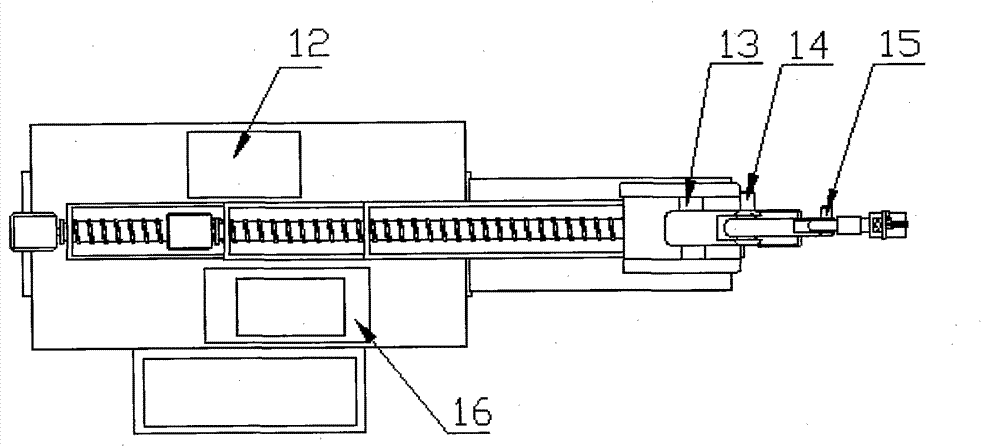
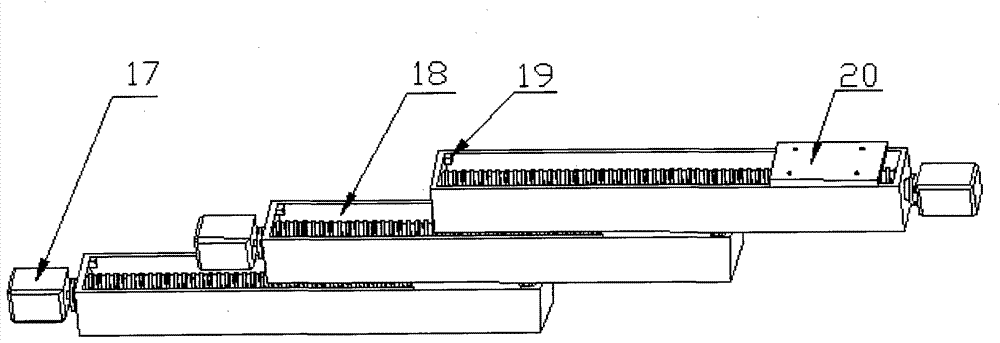
[0033] see figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , a kiwi fruit picking robot, including a mechanical execution system and a control system, is characterized in that:
[0034] The mechanical execution system includes a car body 1, a telescopic sliding platform 3, a five-degree-of-freedom picking robot arm 7 and a two-finger end effector 6; Four rotating wheels 11 are installed on the position through bolt connection, and a traveling drive mechanism is arranged inside the car body. The telescopic sliding platform 3 is fixed on the upper plane of the body 1 by bolts. The five-degree-of-freedom picking machine The rotating base 22 of the arm 7 is fixed on the upper surface of the horizontal motion unit slider 20 of the telescopic sliding platform 3 through bolts, and the two-finger end effector 6 is installed at the end of the picking mechanical arm 7 with five degrees of freedom. The rear side of the car body 1 is provided with a fruit collection box 2, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More