

Fuzzy neural network PID (proportion integration differentiation) control system and fuzzy neural network PID control method for fin stabilizer
A fuzzy neural network and control system technology, applied in the field of fin stabilizer fuzzy neural network PID control system, can solve the problems of inconvenient remote monitoring of driving devices, unstable navigation of ships, and insufficient response, so as to improve adaptability and improve Adaptability and robustness, the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to better understand the technical content of the present invention, specific embodiments are described below in conjunction with the accompanying drawings.
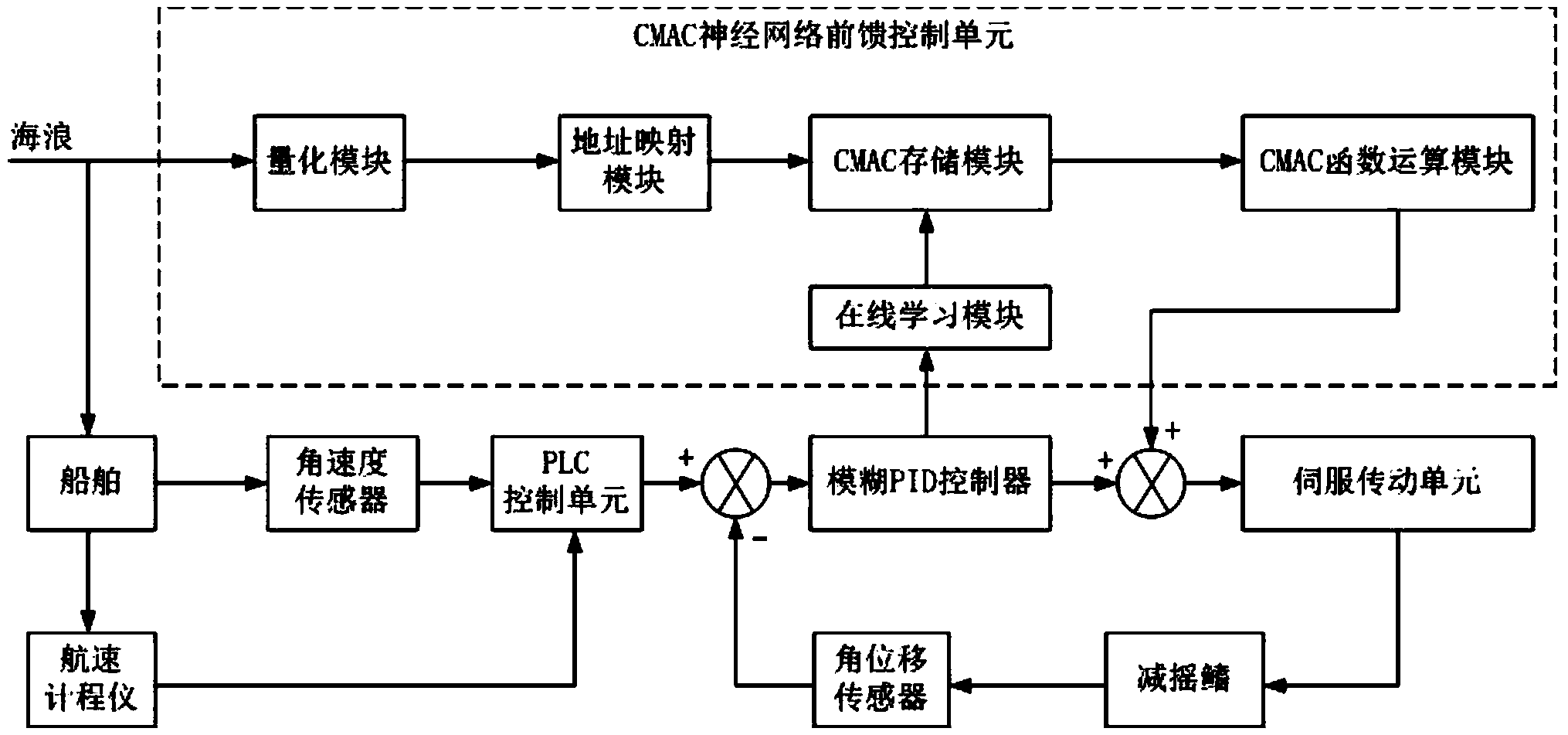
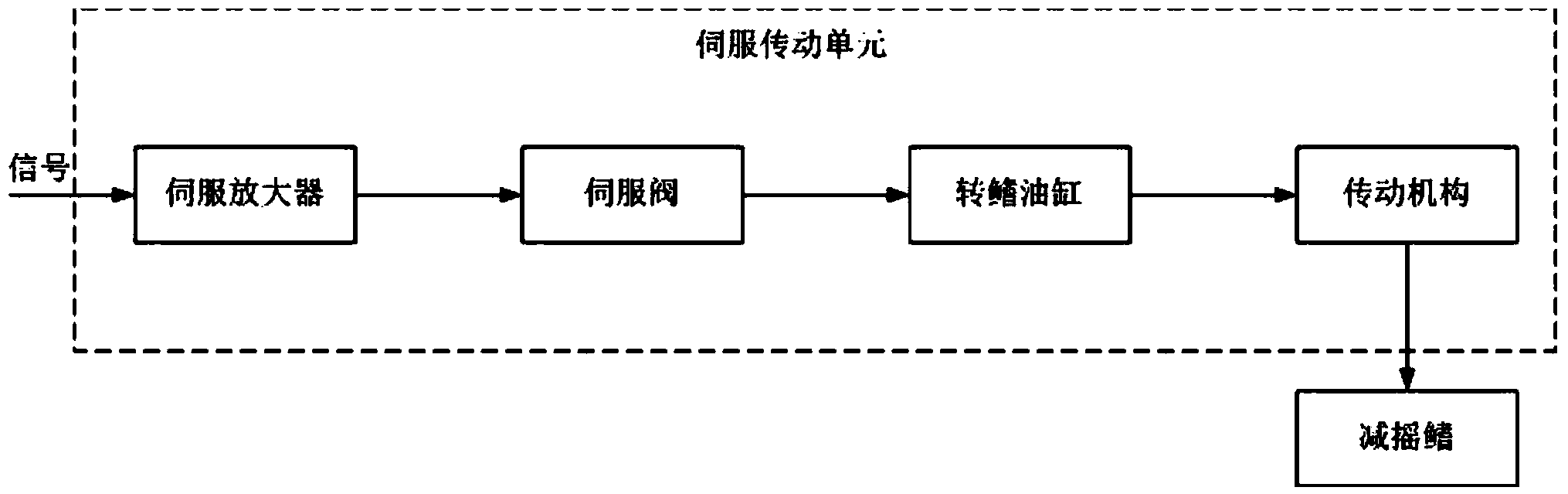
[0034] figure 1 Shown is a schematic diagram of the system structure of a fin stabilizer fuzzy neural network PID control system according to an embodiment of the present invention. Among them, a fin stabilizer fuzzy neural network PID control system includes a CMAC neural network feedforward control unit, a fuzzy PID controller, The PLC control unit, the angular velocity sensor, the angular displacement sensor, the speed log, the fin stabilizer and the fin stabilizer servo transmission unit are used to drive the fin stabilizer to rotate according to the input signal.
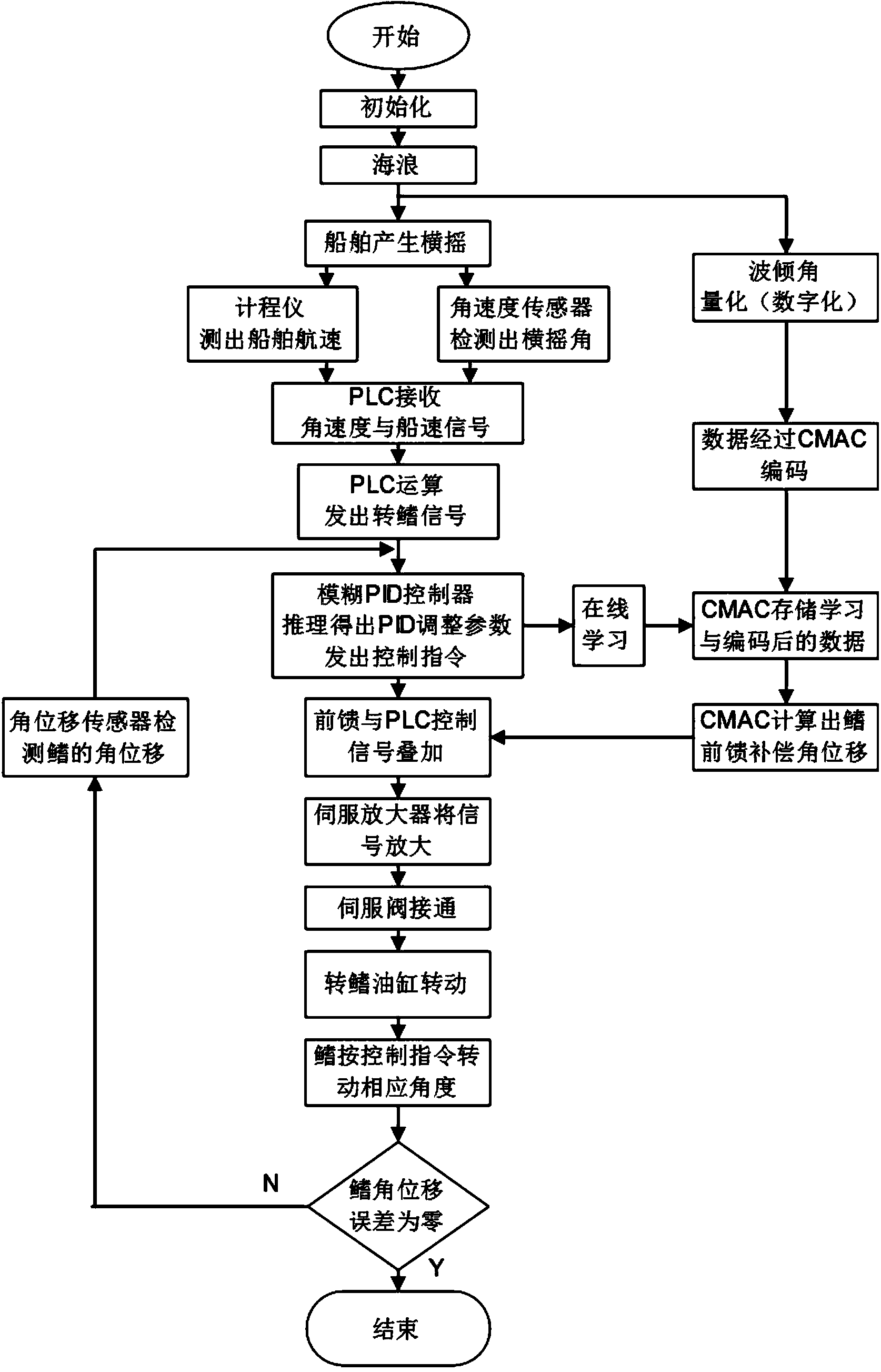
[0035] The CMAC neural network feedforward control unit is used to quantify the detected ocean wave inclination signal, address mapping, and CMAC storage, combined with online learning of the fin angle displacement signal output by the fuzzy PID...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More