Autonomous quadrotor unmanned aerial vehicle positioning and controlling method based on laser radar
A four-rotor unmanned aerial vehicle and lidar technology, which is applied in the research field of autonomous flight control of four-rotor unmanned aerial vehicles, can solve the problems of difficult and precise positioning, weak environmental dependence of positioning accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
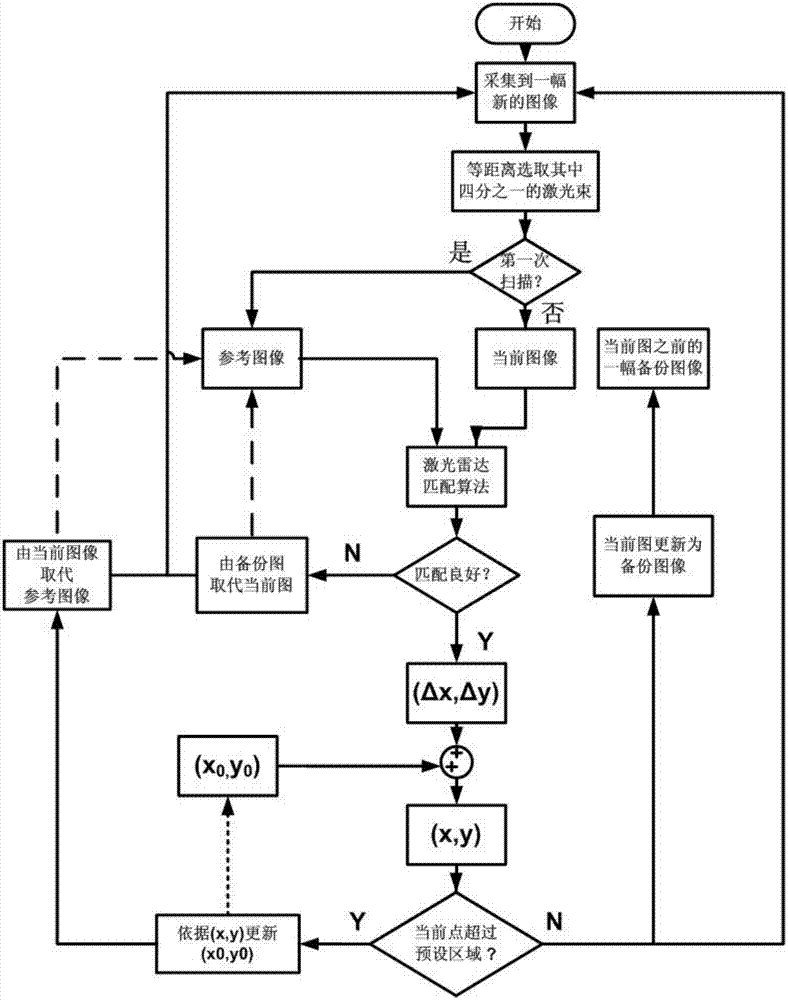
[0048] The technical solution adopted by the present invention is the autonomous positioning and control method of the four-rotor UAV, and the plane displacement and rotation angle measurement: the laser radar is used for iterative relative positioning, so two images need to be selected for comparison, and p is defined here i For a point in the current image, define is a point in the reference image, and the transformation relationship from the reference image to the current image is defined as rotation R(θ) and translation t;
[0049] Assuming that the current number of iterations is k and k>0, iterate until it converges or falls into an iterative loop, and each iterative step is described as follows:
[0050] The first step is to set the initial value of the iteration: if it enters the iterative program for the first time, it will transform and guess the initial value q 0 =(t 0 ,θ 0 ), using the airborne inertial navigation element, by measuring the yaw angle difference ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More