

Information fusion navigation method for detecting fixed-point soft landing process in deep space
A technology that integrates navigation and deep space exploration. It is applied in the field of navigation and can solve problems such as sacrificing navigation accuracy, estimation is not optimal, and difficulty in correlation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
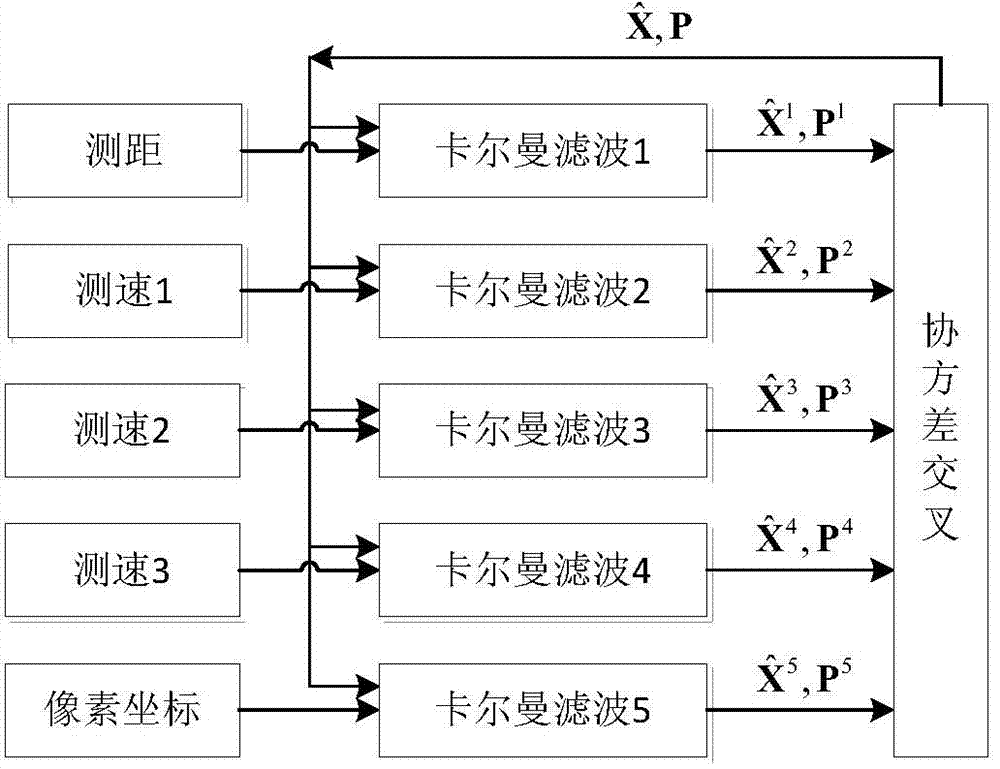
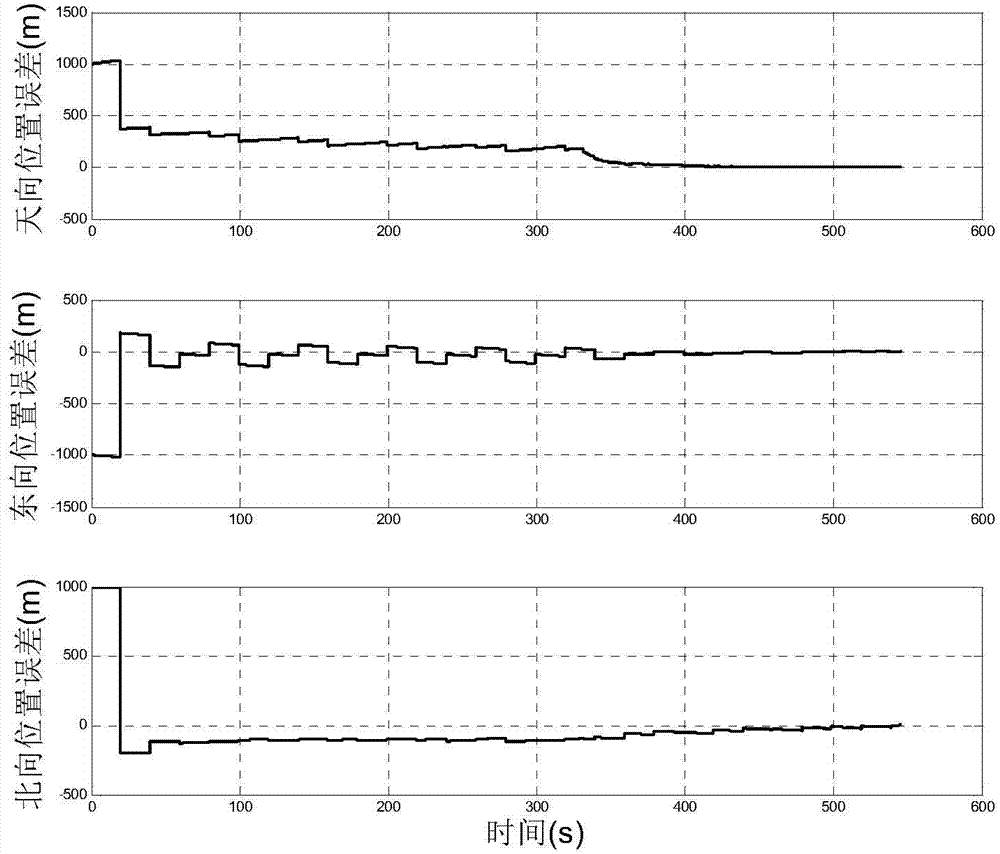
[0093] The initial orbit height of fixed-point soft landing in deep space is 15km. The initial navigation position error is 1000m in the radial direction, -1000m in the normal direction, and 1000m in the forward direction; the speed error is 1m in the radial direction, -1m in the normal direction, and 1m in the forward direction. The ranging scale factor error is 0.1%, the constant value deviation is 0.1m, and the measurement noise is 2%. The speed measurement scale factor error is 0.13%, the constant value deviation is 0.01m / s, and the measurement noise is 0.16m / s. The road sign pixel coordinate error is 0.1 pixel. The random drift of the gyro is 0.2° / h, and the constant drift is 0.2° / h. Accelerometer measurement noise 0.002m / s 2 . The optical navigation sensor works from power down, and the sampling period is 20s. The ranging speed sensor is introduced at an altitude of 10km.
[0094] The position and velocity navigation estimation errors in the three directions of Tia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More