An Electromagnetic Internally Driven Spherical Robot
A spherical robot, driven technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of difficult control, complex motion trajectory, complex driving mechanism, etc., to reduce energy consumption, strong controllability, stable and flexible movement Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
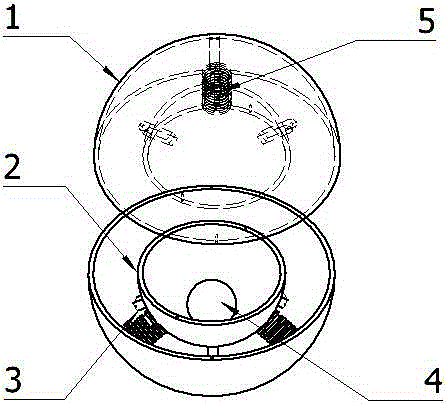
[0024] see figure 1 , the electromagnetic internally driven spherical robot includes an external elastic spherical shell (1), an internal rigid spherical shell (2), six connecting support rods (3), an iron ball (4) and four electromagnet devices ( 5), characterized in that: the outer elastic spherical shell (1) and the inner rigid spherical shell (2) are connected by two hemispherical shells; the connecting support rod (3) is used to connect the outer elastic ball The shell (1) and the inner rigid spherical shell (2); the iron ball (4) is freely placed in the inner rigid spherical shell (2); the electromagnet device (5) is fixedly installed on the outer elastic spherical shell ( 1) On the inner surface, the center of mass of the robot is changed by controlling the electromagnet device (5) to attract the iron ball (4), and the movement of the robot is realized under the drive of gravity.
Embodiment 2
[0026] This embodiment is basically the same as Embodiment 1, and the special features are as follows: the outer elastic spherical shell (1) is made of soft material, which is thermoplastic elastomer TPE, which has the characteristics of high elasticity, high strength, and high resilience. And it has excellent colorability, soft touch and beautiful appearance.
[0027] The internal rigid spherical shell (2) is made of PLA material, which has high strength and high rigidity.
[0028] The surface of the internal rigid spherical shell (2) is coated with a magnetically conductive material to enhance the attraction of the electromagnet device to the internal iron ball.
Embodiment 3
[0030] This embodiment is basically the same as Embodiment 1, and the special features are as follows: see Figure 1~Figure 3 , the electromagnetic internally driven spherical robot includes an external elastic spherical shell (1), an internal rigid spherical shell (2), six connecting support rods (3), an iron ball (4) and four electromagnet devices ( 5).
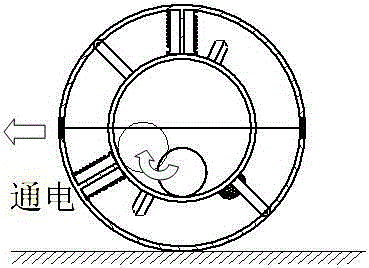
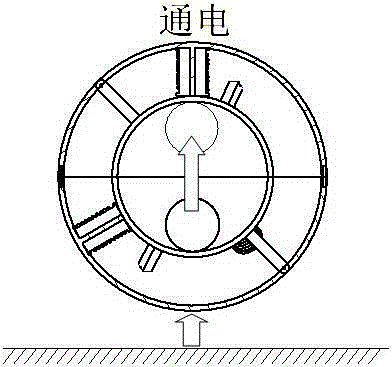
[0031] There are four electromagnet devices (5), which are evenly distributed in space in the shape of a methane molecular structure. The electromagnet devices (5) evenly distributed on the surface of the outer elastic spherical shell (1) are used to place the inner rigid spherical shell (2) The iron ball (4) in ) produces an attractive force to change the center of mass of the robot, and drives the robot to move according to the principle of conservation of angular momentum. By changing the order and time of energizing the electromagnet device (5), the robot can move flexibly, even jumping sports.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com