

Lane line detection method based on feature point piecewise linear fitting
A lane line detection and piecewise linear technology, applied in the field of intelligent transportation, can solve problems such as high algorithm complexity, large memory requirements, unfavorable algorithm real-time performance, etc., and achieve broad application prospects, small amount of calculation, good anti-interference ability and The effect of fault tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0046]The basic hardware condition needed to realize the system structure of the present invention is: a main frequency is 2.4GHZ, and the internal memory is a computer with 1G, and the required software condition is: the programming environment is Visual C++6.0.
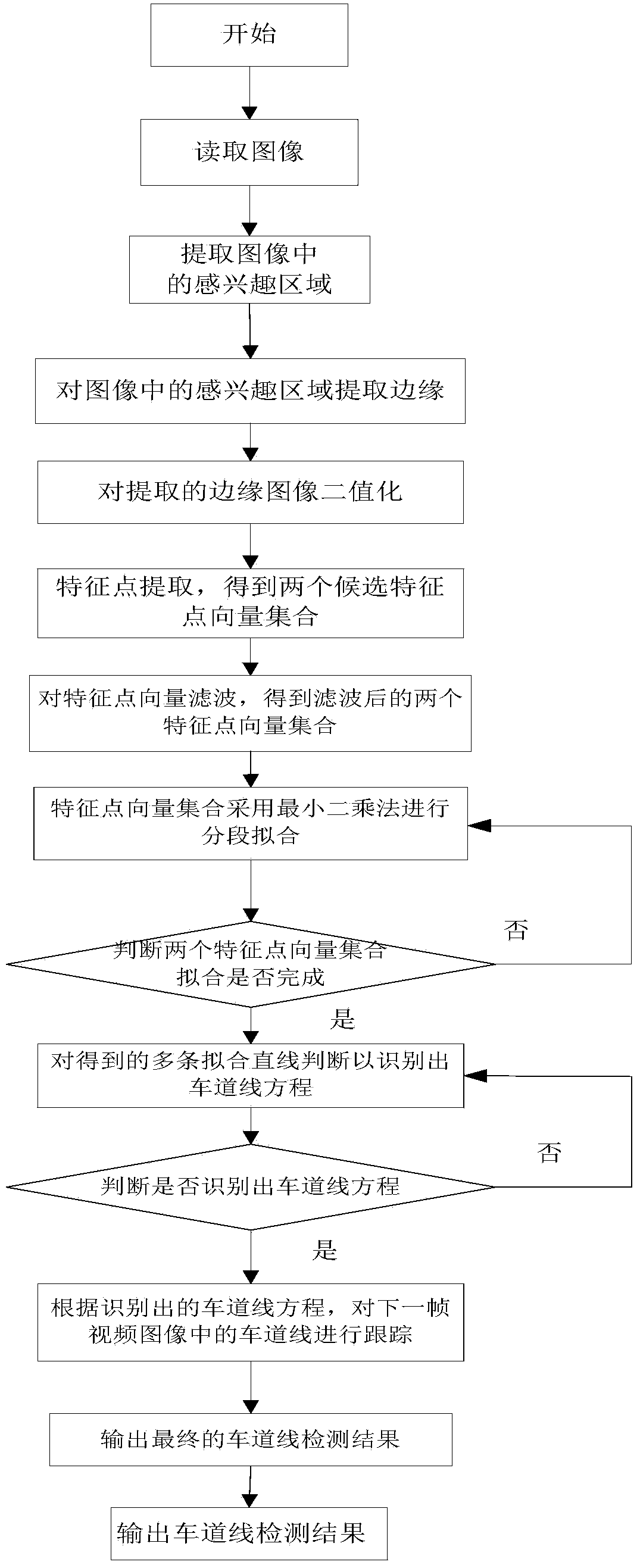
[0047] A lane line detection method based on feature point piecewise linear fitting, the specific steps are as follows:
[0048] Step (1): Start, read the image.
[0049] Step (2): Extract the region of interest in the image, and save the image of the region of interest to the corresponding location. Mainly by clipping the image, the effective road area in the structured road image is extracted, that is, the image of the vehicle's drivable area, and the non-road area map is deleted for subsequent processing.
[0050] Step (3): Use Sobel operator to extract the edge image of the extracted re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More