

Method for detecting position information of patrol robot of transformer substation through mixed observation device
An observation device and position detection technology, which is applied in the control of electromechanical transmissions, control of generators, motor generators, etc., can solve problems affecting the accuracy of rotor position estimation, mixed interference signals, and difficult detection of back EMF. , to achieve the effect of smooth startup, avoiding measurement noise errors, and realizing real-time online detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
[0027] The substation inspection robot adopts the method of detecting position information by the hybrid observation device, and combines the initial position detection closed-loop control system, hybrid observer, model reference normalization algorithm, fuzzy controller, saliency effect compensation controller and hybrid observer together. To accurately and effectively detect the rotor position and speed information of the substation inspection robot, the specific steps are as follows:
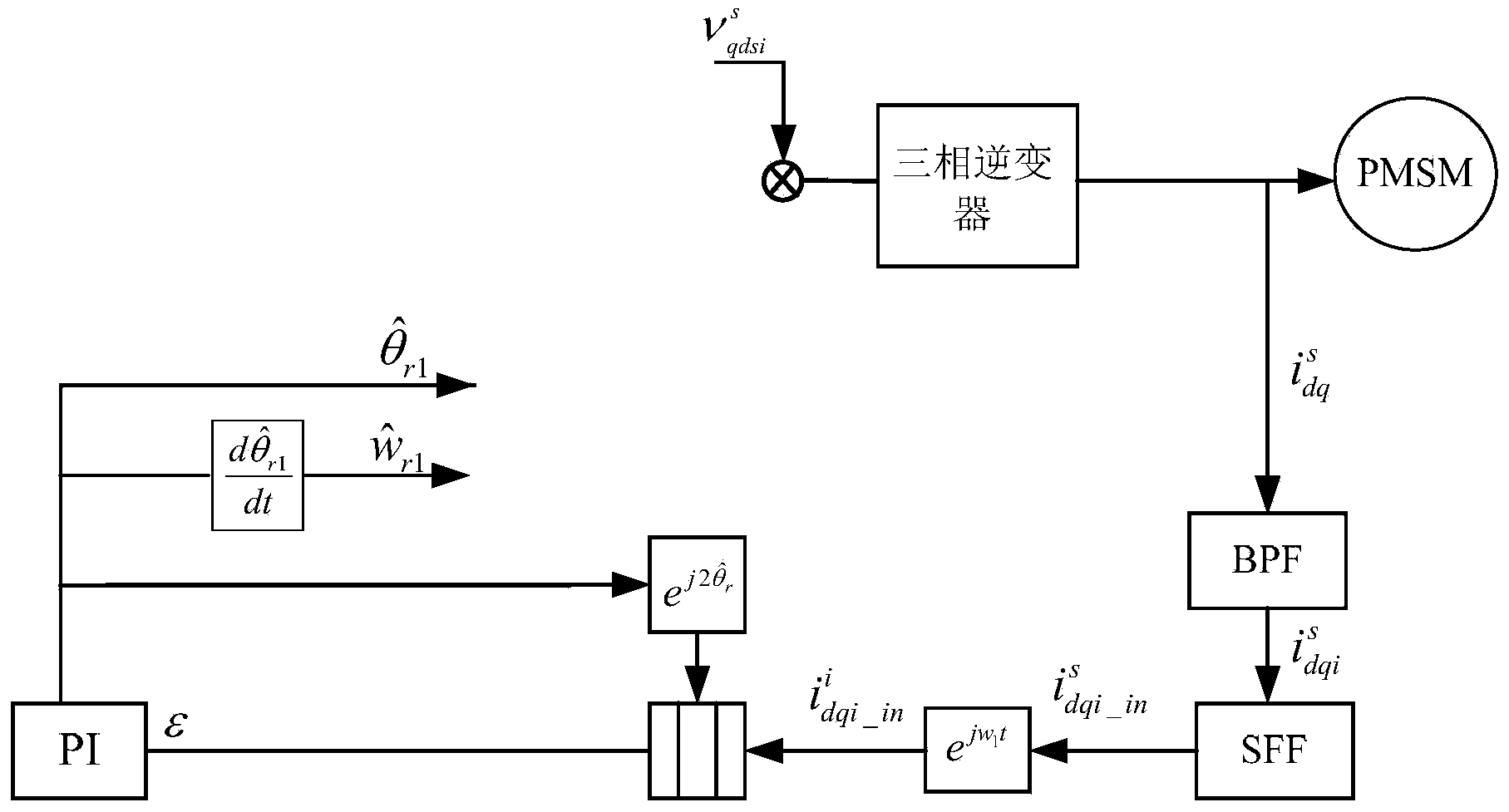
[0028] (1) When detecting the initial position of the PMSM rotor, the initial position tracking closed-loop control system is adopted. Inject a high-frequency voltage signal into the coordinate system, and estimate the initial position of the PMSM rotor by constructing a rotor position tracking closed-loop system;
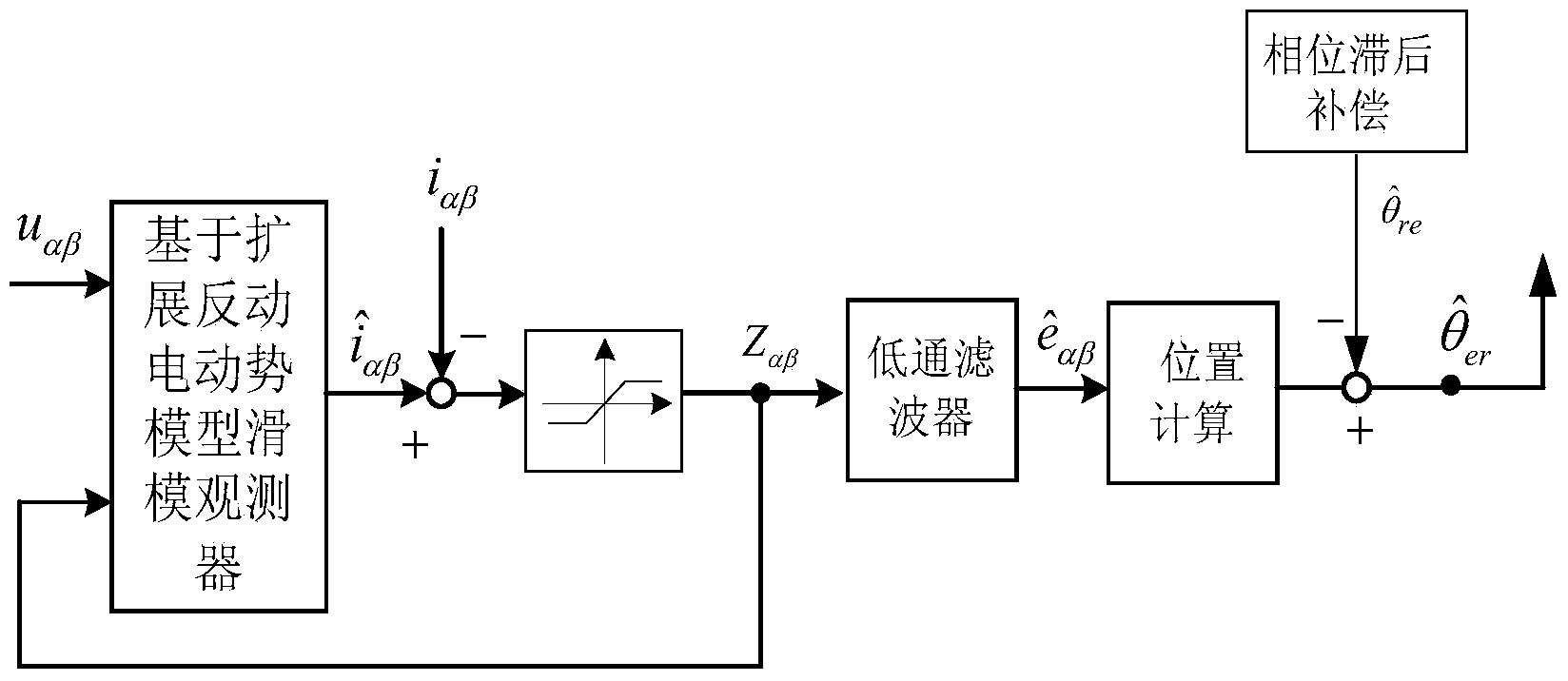
[0029] (2) After the substation inspection robot is running, the hy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More