

Satellite navigation method for interactive multi-model UKF with self-adapting factors
An interactive multi-model and adaptive factor technology, applied in the field of navigation control, can solve the problem of low filtering accuracy and achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0094] In order to better illustrate the purpose and advantages of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and implementation examples.
[0095] In this embodiment, the vehicle-mounted positioning task on the ground is to be completed within 300 seconds. The vehicle moves at a constant speed from 0 to 60 seconds, turns at a constant speed from 60 to 102 seconds, moves in a straight line at a constant speed from 103 to 162 seconds, turns at a constant speed from 183 to 195 seconds, and turns at a constant speed within 196 seconds. Do uniformly accelerated linear motion within 205 seconds, and uniformly decelerate linear motion within 206 seconds to 300 seconds.
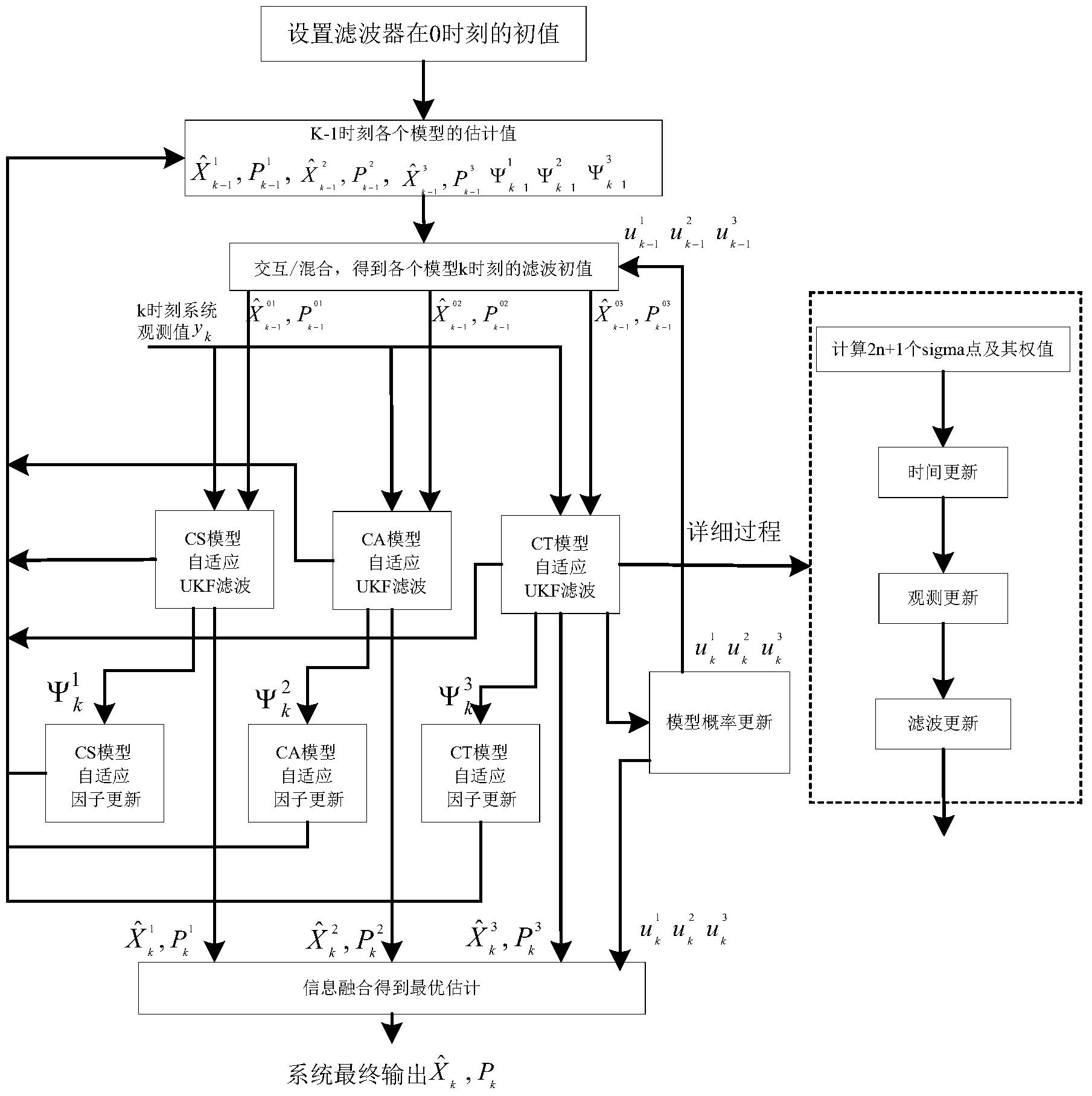
[0096] Use the self-adaptive estimation method applied to satellite navigation proposed by the present invention to perform positioning, and its flow is as follows figure 1 As shown, the specific steps are as follows:
[0097] Step 1: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More