

Robustness recursion filtering method for aircraft attitude estimation under the condition of measurement interference
A technology of attitude estimation and recursive filtering, applied in attitude control, instruments, general control systems, etc., can solve problems such as measurement errors, failure to consider other model uncertainties of the attitude estimation system, and reduce the performance of the attitude estimation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
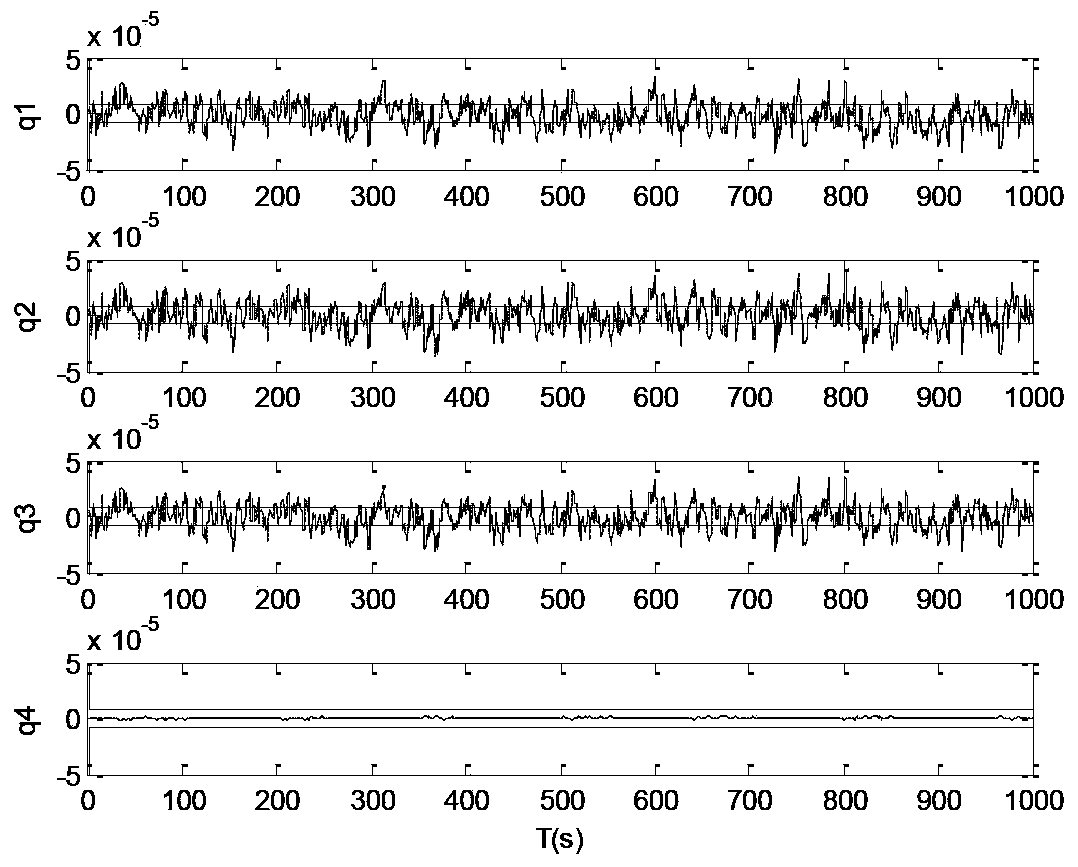
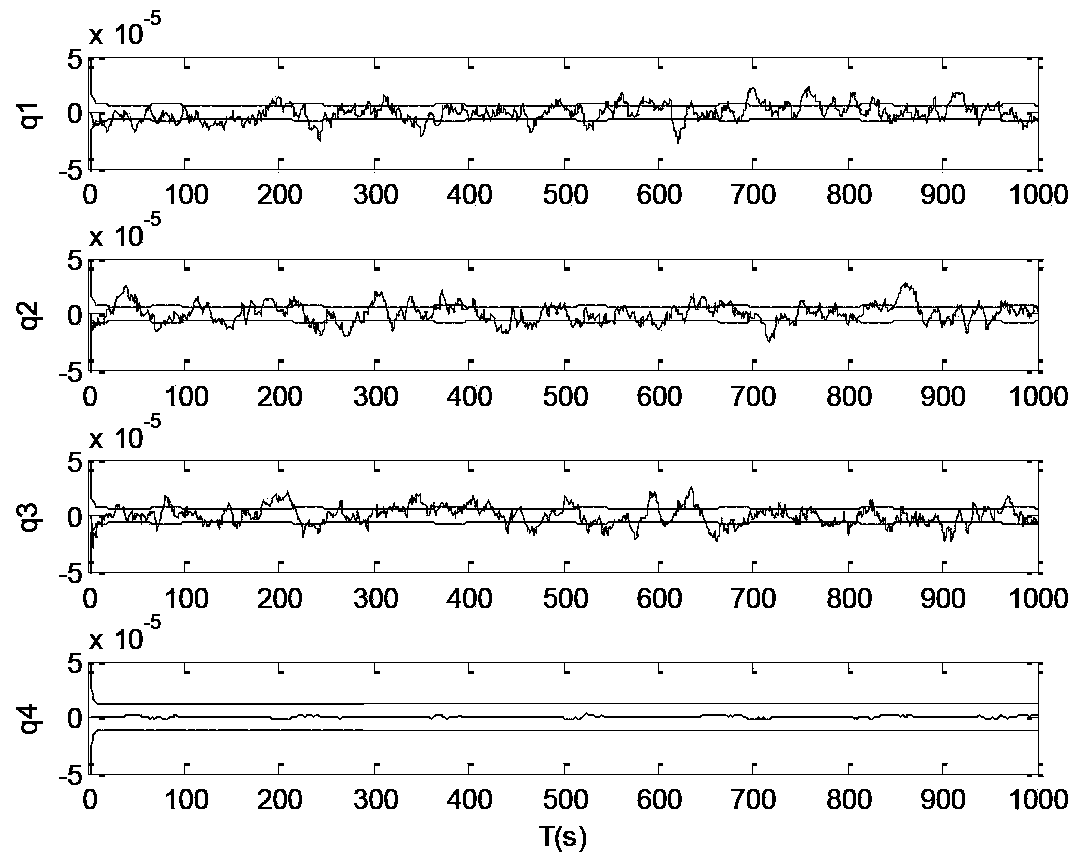
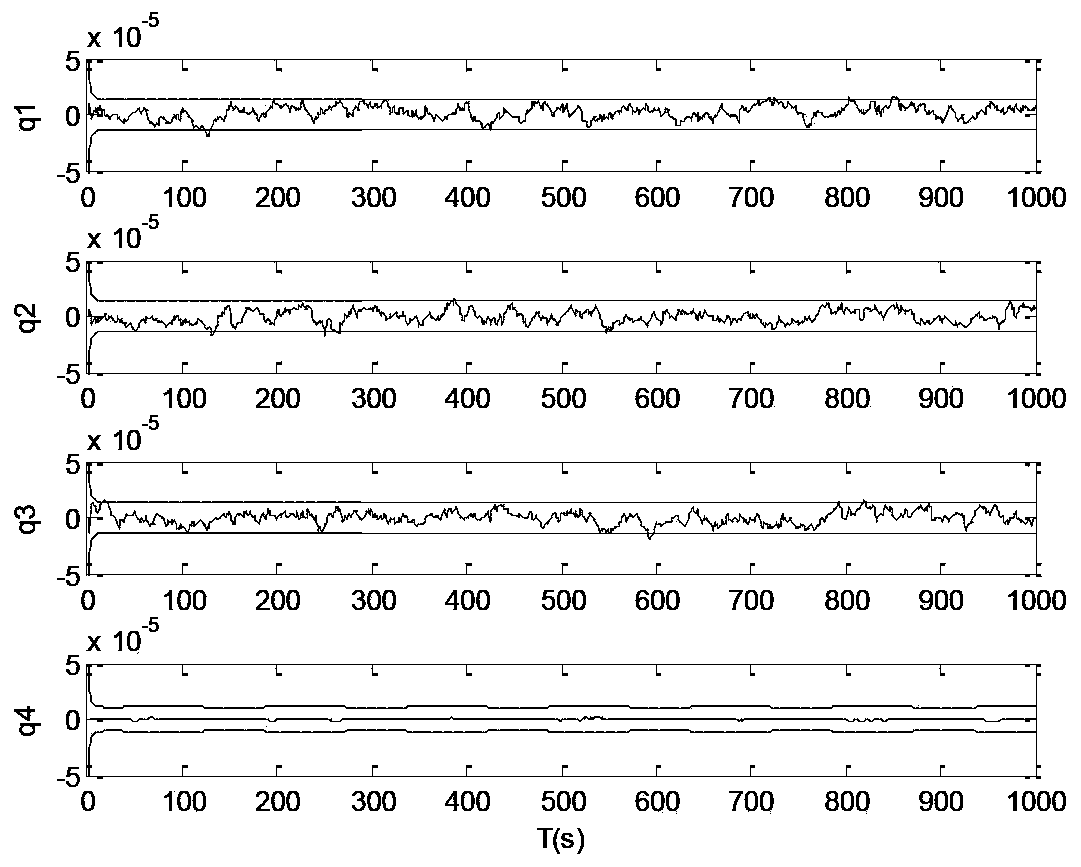
[0082] The robust recursive filtering method used for aircraft attitude estimation under a kind of measurement disturbance that the present invention proposes is to carry out simulation experiment by Matlab simulation software, compare with the estimated performance of existing filtering algorithm, as additive extended Kalman filtering ( AEKF) and Robust Extended Kalman Filter (REKF). The simulation hardware environment is Intel(R) Core(TM) i5-2410M CPU2.30GHz, 4G RAM, Windows7 operating system. Such as Figure 1 to Figure 3 As shown, the solid line represents the quaternion estimation error, and the dotted line represents the root mean square of the corresponding elements in the error covariance matrix. It can be clearly seen that the error of the quaternion vector part of the AEKF and REKF algorithms exceeds the range of the calculated variance. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More