

Real time three dimensional imaging system based on laser light and visual sense
A real-time three-dimensional imaging system technology, applied in the direction of using optical devices, measuring devices, instruments, etc., can solve the problems of large amount of calculation, slow point-by-point correspondence matching, and limited application fields, etc., to achieve good real-time performance and convenient installation , The effect of simple process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
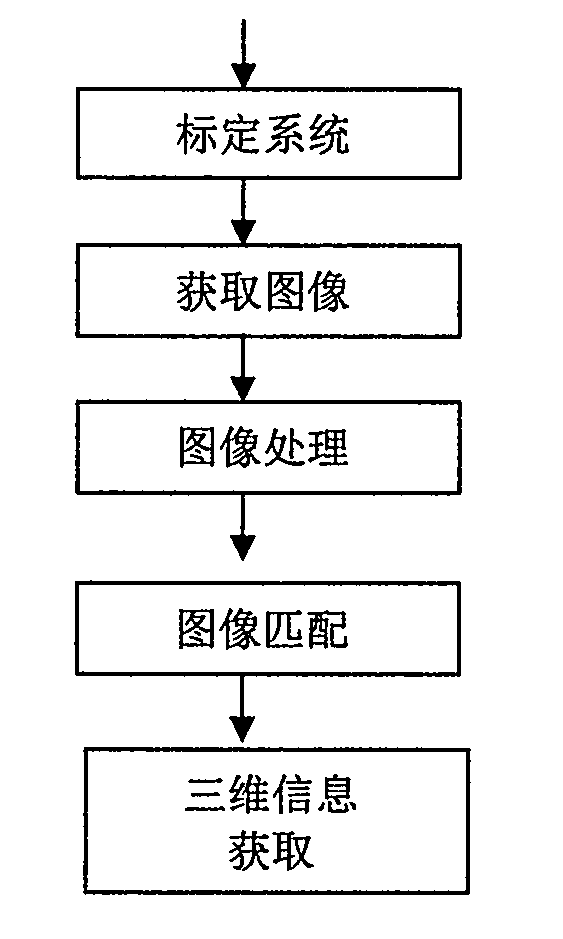
[0021] The specific steps of the system to achieve three-dimensional positioning are as follows:
[0022] The first step: the camera sends the image of the target in the field of view to the vision processing computer
[0023] Step 2: Vision processing The computer calculates the two-dimensional position of the target on the vision plane and sends this information to the public storage area
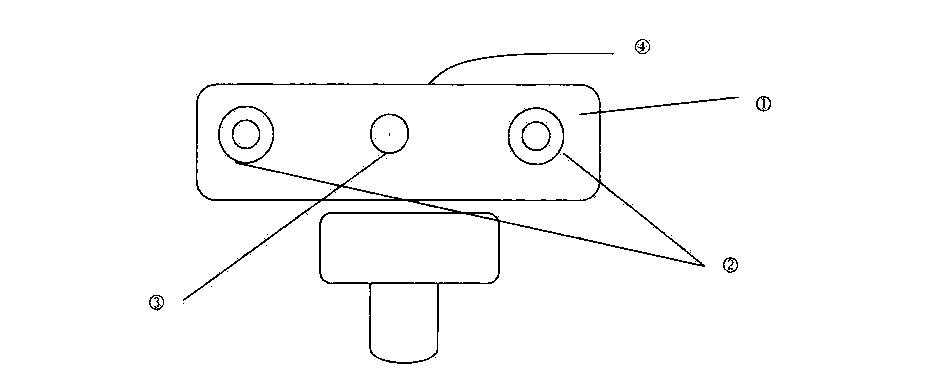
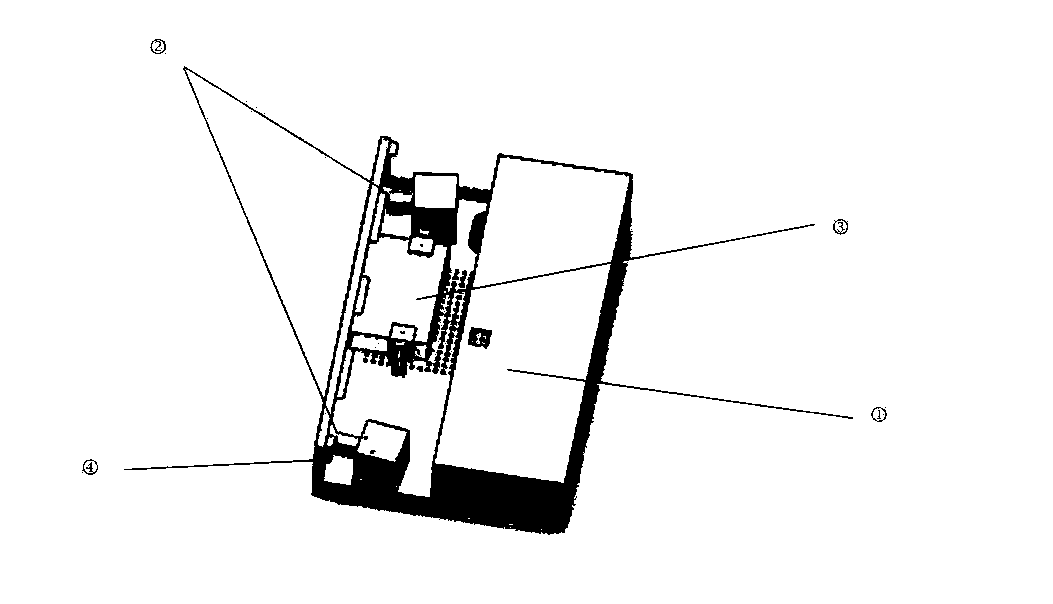
[0024] Step 3: Control the computer to read the position data of the public storage area, and the control program performs coordinate transformation and real-time three-dimensional imaging according to the installation positions of the camera and semiconductor laser emitter, and the depth information of the target can be obtained by triangulation and transmitted to the vision The final three-dimensional information of the target is obtained after comprehensive computer processing.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More