

Networking time-delay compensation and control method using active-disturbance-rejection control technology for permanent magnet synchronous motor
A permanent magnet synchronous motor, active disturbance rejection control technology, applied in the direction of observer control, single motor speed/torque control, motor parameter estimation/correction, etc., can solve the problem that the system control input cannot be updated in time and reduce system control Performance, difficult to implement, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the technical solutions and design ideas of the present invention clearer, a detailed description will be given below in conjunction with the accompanying drawings.
[0065] Reference Figure 1 ~ Figure 5 , A networked permanent magnet synchronous motor time delay compensation and control method using active disturbance rejection control technology, the method comprising:
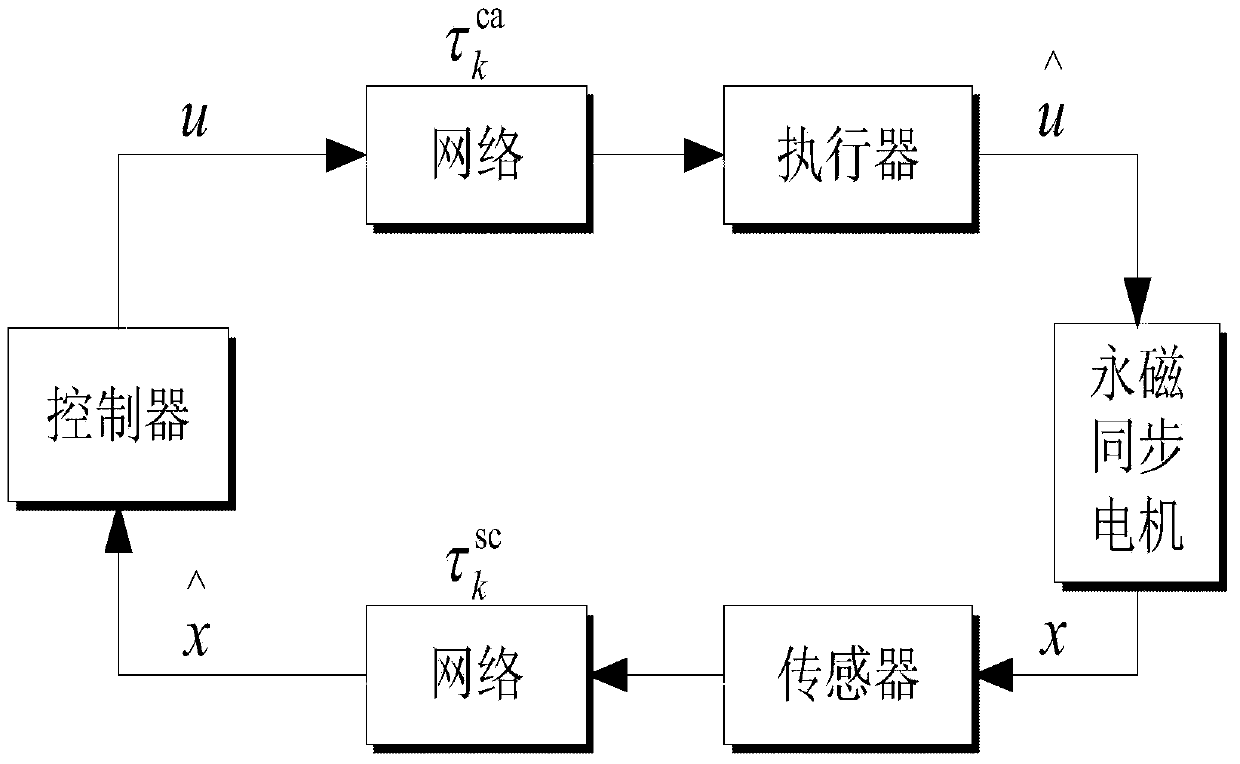
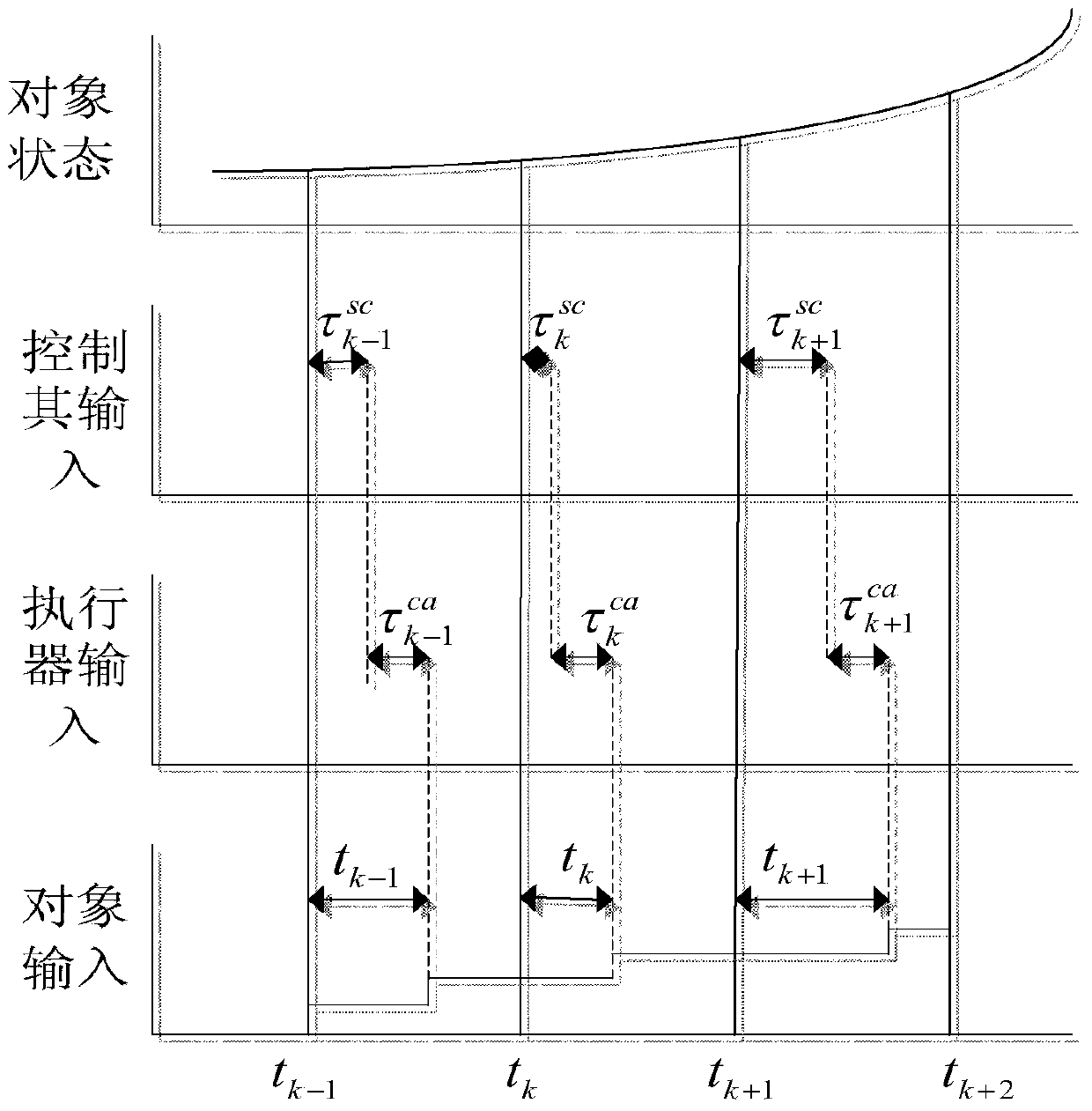
[0066] Such as figure 1 As shown, due to the introduction of the network, there is a delay in the data transmission process, mainly including the delay between the sensor and the controller And the delay between the controller and the actuator Total time delay of control loop The permanent magnet synchronous motor control system model with the influence of time-varying network-induced delay is shown in equation (13), and the specific modeling process refers to step 1 in the implementation.
[0067] x 1 ( k + 1 ) = x 1 ( k ) + T ( - a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More